
3相モーターをベクトル制御で直ぐ回せる!
Texas Instruments社
InstaSPIN™ソリューション
InstaSPIN™とは
Texas Instruments社(以下、TI社) の InstaSPIN™ソリューションを使うと、3相モーター(BLDC, PMSM, IPM, ACI)ををベクトル制御で誰でも簡単に回すことができます。これまでモーターをマイコンで制御したことがない方、BLDCモーターをセンサレスで駆動させたい方、DCモーター、ステッピングモーターからBLDCモーターへの移行を考えているが、制御方法がわからない方など、どのような方でも3相モーターを簡単に回すことができます。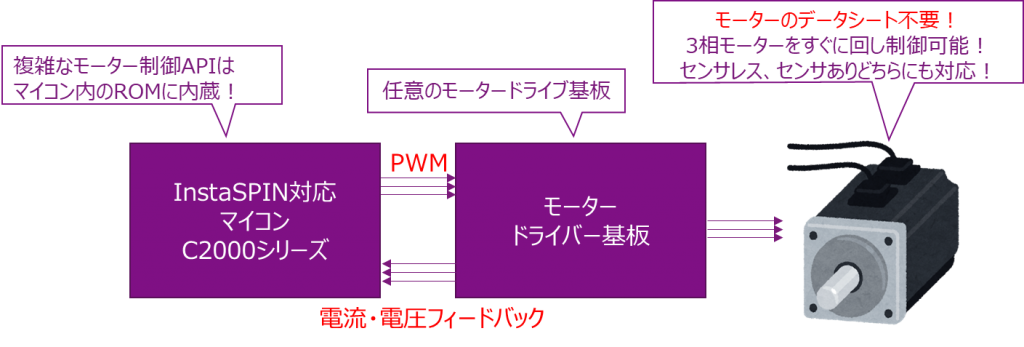
3相モーターをベクトル制御で回すためには
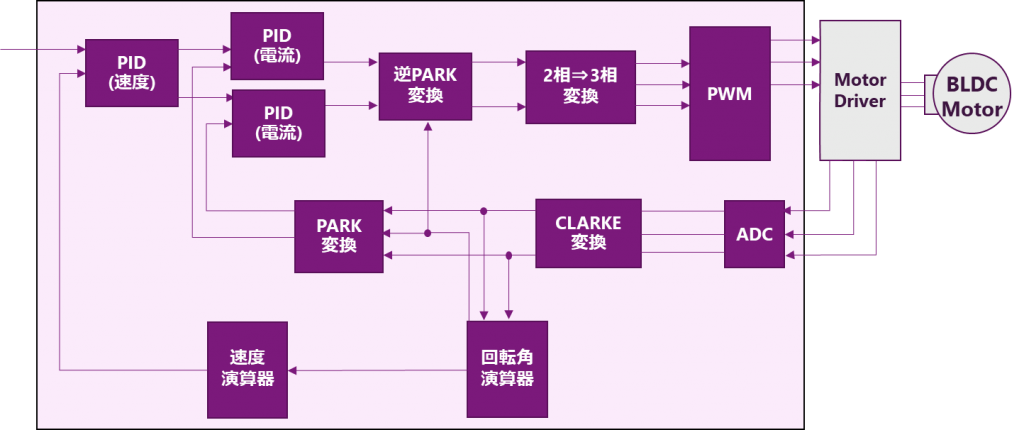
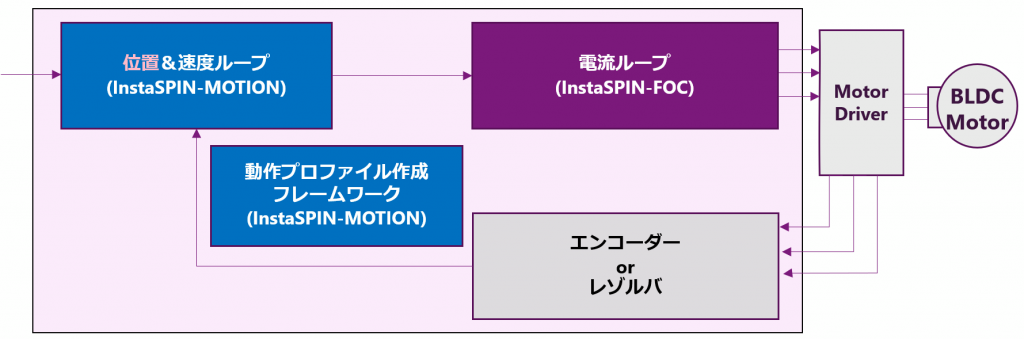
3相モーターをベクトル制御で回すためには、たくさんの知識が必要です。Park変換、逆Park変換、Clarke変換、逆Clarke変換、PI制御(電流、速度)などを理解し、チューニングして使いこなす必要があります。さらに、これをセンサレスで実現しようとした場合には、さらに角度推定の仕組み、速度推定の仕組みを構築する必要があります。3相モーターをセンサレスのベクトル制御で回す場合、上記の機能がひつようとなりますので、以下のような制御ブロックとなります。紫の枠内の演算(ベクトル制御アルゴリズム)部分については、全てマイコンでプログラムし実装しなければなりません。
 ベクトル制御アルゴリズムをプログラムするには、この理論の理解が必須となり、また、このアルゴリズムの実装が完了したとしても、さらにモーターに合わせてチューニング作業が必要となります。このチューニング作業も知識と経験が必要となりますので、経験がない方はかなり大変な作業になると思います。
このベクトル制御の経験がない方でも、簡単に実装しチューニングを可能にするものがInstaSPIN™になります。
ベクトル制御アルゴリズムをプログラムするには、この理論の理解が必須となり、また、このアルゴリズムの実装が完了したとしても、さらにモーターに合わせてチューニング作業が必要となります。このチューニング作業も知識と経験が必要となりますので、経験がない方はかなり大変な作業になると思います。
このベクトル制御の経験がない方でも、簡単に実装しチューニングを可能にするものがInstaSPIN™になります。
InstaSPIN™の機能
InstaSPIN™にはInstaSPIN-FOC、InstaSPIN-MOTIONの2つのソリューションがあります。InstaSPIN-FOCは、モーターの識別、FASTソフトウェアエンコーダー、ベクトル制御の電流ループの自動チューニング機能を持っています。InstaSPIN-MOTIONはこの機能に加えて、イナーシャの識別、ベクトル制御の速度ループチューニング、動作プロファイル構築機能が含まれます。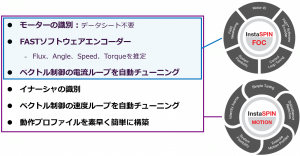
モーターの識別
InstaSPIN-FOC対応マイコンを搭載したモーター制御基板にモーターを接続し、モーターの識別プログラムを実行することで、モーターの抵抗値(R)、インダクタンス値(L)、磁束(Flux)を識別することが可能な機能です。この機能によりデータシートの無いモーターも使用することができます。モーターの識別デモ動画
FASTエンコーダー
モーターの電流、電圧値から、モーターの現在の磁束、角度、速度、トルクを推定するエンコーダーになります。この機能を使うとセンサレスでベクトル制御を実現することができます。ベクトル制御の電流ループを自動チューニング
モーター制御の電流ループを自動でチューニングする機能となりますので、ユーザーは電流制御ループ部を調整する必要がありません。イナーシャの識別
イナーシャ(慣性モーメント)の識別プログラムを実行すると、モーターの加速度テストをが実行され、イナーシャを推定できます。ベクトル制御の速度ループを自動チューニング
通常はPI制御を用いてユーザーで調整する速度ループを、上で識別したイナーシャのパラメータを用いて、一つのパラメータで誰でも簡単にチューニングできる機能になります。動作プロファイルを素早く簡単に構築
例えば洗濯機のような動作、洗濯(正転)→洗濯(逆転)→脱水(高速回転) など、任意の動作プロファイルを簡単に作成可能となります。 InstaSPIN™の動作については以下の動画で、モーターの識別、イナーシャの推定、速度ループのチューニングなどを行っていいますので、ご参考ください。InstaSPIN-MOTION GUI デモ動画
まとめ
InstaSPIN™を用いることで、複雑なベクトル制御演算、電流ループのチューニング、速度ループのチューニング、センサレス制御の位置推定を誰でも簡単に実装することができるようになります。また、動作プロファイルも簡単に作成できますので、所望のアプリケーション動作をすぐに再現可能となります。このInstaSPIN™を使うことで、先程紹介したマイコンで実装しなければならなかった複雑なベクトル制御を、全てInstaSPIN™が担ってくれます。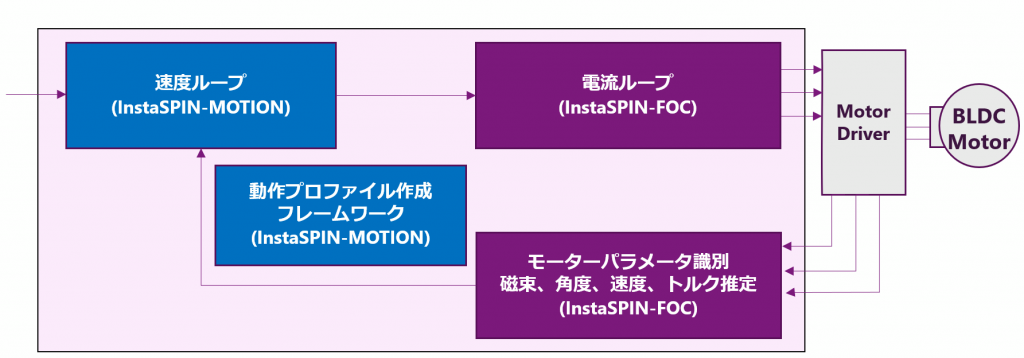
また、InstaSPIN™にエンコーダーを用いて、位置制御を実現することも可能となります。これによりロボットのアーム制御なども容易に実現ができます。
 このInstaSPIN™を評価するために、モーター駆動容量ごとに様々な評価ボードが用意されておりますので、動かしたいモーター仕様に合ったボードをご購入いただくことで、すぐにモーターを回し評価することができます。
このInstaSPIN™を評価するために、モーター駆動容量ごとに様々な評価ボードが用意されておりますので、動かしたいモーター仕様に合ったボードをご購入いただくことで、すぐにモーターを回し評価することができます。| モーターキット型番 | 対応マイコンボード | モータードライバ | モーター駆動容量 |
|---|---|---|---|
| BOOSTXL-DRV8301 | Piccolo F28027F LaunchPad | DRV8301 | 6 ~ 24V、10A |
| Piccolo F28069M LaunchPad | |||
| BOOSTXL-DRV8305EVM | Piccolo F28027F LaunchPad | DRV8305 | 4.4 ~ 45V、15A |
| Piccolo F28069M LaunchPad | |||
| DRV8301-69M-KIT | Piccolo F28069M 付属 | DRV8301 | 6 ~ 60V、40A |
| DRV8305-Q1EVM | TMS320F28027Fがボードに実装済み | DRV8305 | 4.4 ~ 45V、25A |
| DRV8312-69M-KIT | Piccolo F28069M 付属 | DRV8312 | 12 ~ 52V、3.5A |
| TMDSHVMTRINSPIN | Piccolo F28069M & | ||
| TMDSHVMTRINSPIN | Piccolo F28069M & | Powerex IPM | 50 ~ 350V、10A |
| Piccolo F28027F 付属 |