- 公開日:2022年09月27日
- | 更新日:2022年11月18日
新人エンジニア奮闘記(全4話) ~第2話 アイディアからロボットに!設計製作編~
- ライター:GR
- マイコン
はじめに
読者の皆さんこんにちは!22年4月入社の新人FAEのGRです。前回に引き続き私の製作実習奮闘記を配信していきます。今回は設計製作編で、実際に詳細設計・組み立てをおこなっていきます。果たして順調にロボット製作を進められるのか?ぜひ温かい目でご覧ください。
1話目はこちら⇒ https://emb.macnica.co.jp/articles/19419/
回路の設計と組み立て
1話の構想編でロボットに必要なハードウェアを洗い出しました。そのハードウェアの機能から必要なセンサーや素子などの部品を選定し、設計していきます。今回の主な制約条件はマイコンにMSP430を使っているので、マイコン電源は3.3 Vにしたため、マイコンGPIOの上限電圧はマイコン電源電圧付近となるため、センサー出力信号がMax 3.3 V程度の物を選ばなければなりません。このような制約事項に注意しつつ選定・設計を進めました。
ロボットに必要なハードウェア(第1話より)
・移動用の機構(タイヤとモーター)
・壁に貼り付ける吸引機構(吸引モーター)
・加速度センサーorジャイロセンサー
・ロータリーエンコーダー+赤外線センサー
・制御のデバックのためのセンサー値表示用LCD
・赤外線センサー動作確認用LED
ここからセンサーやモータドライバーを選定し、これらのデータシートをもとに回路を設計し、組み立てました。回路の実装は先輩から頂いたユニバーサル基板で、赤外線センサー基板x3、モータドライバー基板x1、そのほかマイコンボードにくっつける基板x1の計5枚の基板を製作しました。
初めは図1のようにブレットボード上で設計した回路図が間違っていないかテストします。
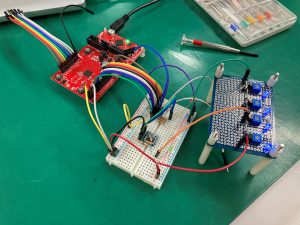
図1.設計した回路のテスト
ブレットボード上で動作が確認できたら、いよいよユニバーサル基板に実装していきます。
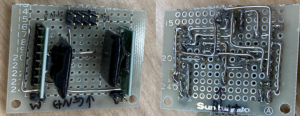
図2.ユニバーサル基板への実装(モータドライバー)
図2はユニバーサル基板に実装したモータドライバー回路です。ちょうどいい太さの被膜の付いた銅線がなかったので、被膜の無いすずメッキ線で空中配線しています(笑)結局シャーシに取り付けの時に邪魔になり、後で被膜付きの銅線に取り替えました。
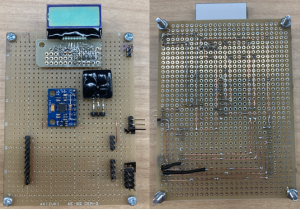
図3.ユニバーサル基板への実装(マイコンボードにくっつける基板)
図3はマイコンボードにくっつける基板で、加速度センサー、LCD、マイコン電源回路が乗っています。この基板は先輩から「半田うまいね」と褒められました。もともと手先が器用なことには自信があったので、とてもうれしかったです。大きな画像で載せておきます(笑)
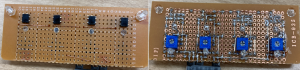
図4.ユニバーサル基板への実装(赤外線センサー基板)
図4のような赤外線センサー基板を3枚製作しました。赤外線センサーLEDの明るさを変えて、デジタルの受光素子の閾値を変えるため、図にある青い可変抵抗がついています。ロボットに組み込むと調整が非常にしにくくなってしまったので、組み込み後のことも考えられていればと後悔しています。
組み立て、そして…
前章でそれぞれの基板が完成しました。組み立て後の動作確認も難なくクリアし、いよいよ組み立ててロボットの形にする工程まで来ました。ロボットの基盤(シャーシ)は1 ㎜厚のアルミ板に穴をあけて作りました。そして…

図5.組み立て後のロボット
完成しました!!恐る恐るバッテリーをつないでみると、動きました!思った通りの動作です。早速プログラムを作ってロボットを動かします。パパっとサンプルプログラムからモータドライバーにPWM信号を送るプログラムを作り、書き込み動作確認をおこない、動くことを確認しました。ここでテンションが上がって(マイコンリセットのための)バッテリーの抜き差しを頻繁におこなっていたら、、、
逆接しました。コネクターの向きが逆でした。
修理と対策
前章で電源の逆接により、ロボットが動かなくなってしまいました。逆接の原因としては以下のように考え、対策をおこないます。
・電源スイッチがなく、バッテリーの抜き差しで電源のON/OFFをおこなっていた
・基板側コネクターに裏表のないものを使っていた
その前にロボット故障個所の特定ですが、激しく煙を出したDCDCコンバーターを外し、安定化電源でモジュールごとにテストした結果、電源回路以外壊れていませんでした。そのため、DCDCコンバーターを新しいものに交換してからバッテリーコネクターの交換、電源スイッチの増設をおこないました。
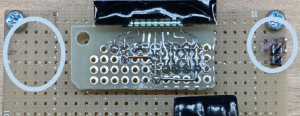

図6. 改善点 (上)改善前(下)改善後
※左:裏表のあるコネクター、右:電源スイッチ
おわりに
前回の記事ではアイディアだったものが、今回の記事で実際に動くロボットとなりました。これからお掃除用プログラムの作成、ホワイトボードに張り付く機構のテストをおこなっていきます。果たしてこのロボットは思った通りに動くのか、次回もお楽しみに!!
1話目はこちら⇒ https://emb.macnica.co.jp/articles/19419/
新人プロフィール

名前:GR
出身:神奈川県
出身学科:機械システム工学科
趣味:自転車競技など
写真:大学が豪雪地帯にあり、学生時代に作った雪だるまです