- 公開日:2022年10月20日
- | 更新日:2022年12月07日
新人エンジニア奮闘記(全4話) ~第3話 アイディアからロボットに!苦悩編~
- ライター:GR
- その他
はじめに
読者の皆さんこんにちは!22年4月入社の新人FAEのGRです。前々回、前回に引き続き私の製作実習奮闘記を配信していきます。ロボットを1話目では構想、2話目で設計・製作しました。今回は苦悩編で、このロボットの1番の山場ともいえる、ホワイトボードに張り付く機構についてです。果たして順調にロボット製作を進められるのか?ぜひ温かい目でご覧ください。
机上での動作テスト
2話でロボットが完成しました。ロボットの動作はホワイトボードに張り付く機構以外、動作確認できていますので、張り付き機構の製作と同時にプログラムを作成していきます。ロボットのコントローラにはTI社のMSP430シリーズを使用しているので、TI社HPからサンプルプログラムがダウンロードでき、こちらをベースに作成していきます。
TI社HP サンプルプログラム
https://www.ti.com/tool/MSPWARE
3Dプリンタでのプロペラ製作
2話のロボット完成段階では、図1のような市販のドローン用のプロペラを使っていました。この状態でプロペラをDuty比90%で回転させても壁には張り付きませんでした。ロボットを壁に押し付けながら動作させてみると、手で感じた限りでは図2のように風の吸い込む方向、吐き出す方向が同じ上側で、プロペラ中心部で吸気、円周付近で排気しているように感じました。そのためこの市販のプロペラでは壁に張り付くことは現実的に難しいので、風の流れが理想通りになるプロペラを3DCADでモデリングし、3Dプリンタで印刷して製作することにしました。
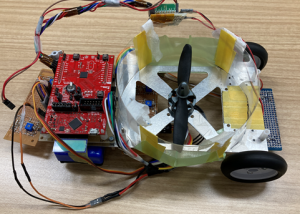
図1.第2話組み立て後のロボット
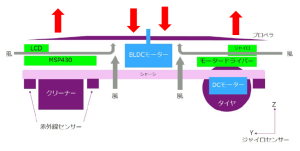
図2.ロボット吸引イメージ 理想(灰) 現実(赤)
3Dプリンタで制作したプロペラの実験
前章で、市販のプロペラではロボットが壁に張り付くには不十分だとわかりました。そこでロボット競技で使用されている吸引ファンや、PC・サーバーに使われている吸引ファンを参考に、数種類のプロペラを3DCADでモデリングし、3Dプリンタで印刷して評価しました。
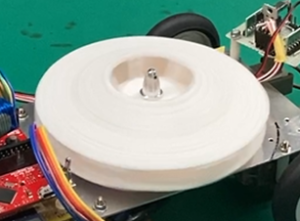
図3.プロペラ案A
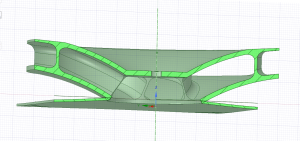
図4.プロペラ案Aの断面図
図3はロボット競技で使用されていた吸引ファンを参考にしたプロペラです。今回のロボットに合わせ、直径を100㎜にして設計し、印刷しました。使用した3Dプリンタは非常に古い(10年位前に購入したもの)ので、このような複雑な形状を印刷すると、
・出力物のバリが多い
・サポート材がきれいに剝がれない
・出力物の重心が回転中心にない
・実際にロボットに取り付けて回転させたら振動が非常に大きい
などの理由で全く使えないものでした。
次にPCやサーバーのファンを参考にモデリングしたものを図4に示します。実験的に小さいものを作ってみたのですが、自宅のドライヤー並みの風量が出ていたので、十分な風量だと考え、この案Bを採用しました。しかし、十分な風量が得られるDuty 90%程度で高速回転させると、振動が大きく、ロボットが自然と移動してしまうほどでした。
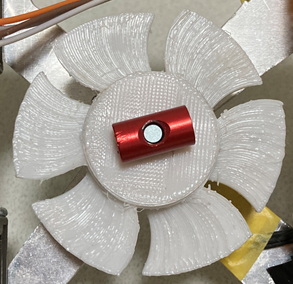
図5.プロペラ案B
張り付き機構の妥協と改善
前章までは風の力で張り付く機構の改善に取り組んできましたが、プロペラの改良では振動がどうしても抑えられないため、自分の使える設備・工具だけでは実現できないと考えました。そこで以前より予備の案として考えてきた、磁石の力も利用して壁に張り付く機構を採用することにしました。今回製作したロボットが壁と接地している部分はタイヤとクリーナーなので、この2つに100均で買ってきた磁石をこっそり仕込みました。結果、磁石の力のみでホワイトボードに貼り付けるようになってしまい、プロペラで張り付く機構は飾りのようになってしまいました。(笑)
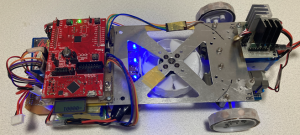
図6.磁石仕込み後のロボット
タイヤには図6のようにフレキシブルな磁石に穴をあけ、そこに強力な磁石を埋め込みホイールに巻くという方法で仕込みました。

図7.磁石on磁石
おわりに
前回の記事では、ロボットが壁に張り付くのに必要なアクチュエータの製作においての試行錯誤をお届けしました。最終的に当初の設計(プロペラのみで張り付く)から磁石の力をメインに使用して張り付く機構に変更しました。次回は最終話です。果たしてこのロボットは壁に張り付いた状態で動くのか、次回もお楽しみに!!
新人プロフィール

名前:GR
出身:神奈川県
出身学科:機械システム工学科
趣味:自転車競技など
写真:大学が豪雪地帯にあり、学生時代に作った雪だるまです