- 公開日:2022年11月09日
- | 更新日:2022年12月07日
新人エンジニア奮闘記(全4話) ~第4話 アイディアからロボットに!完結編~
- ライター:GR
- その他
はじめに
読者の皆さんこんにちは!22年4月入社の新人FAEのGRです。前々回、前回に引き続き私の製作実習奮闘記を配信していきます。ロボットを1話目では構想編、2話目で設計・製作編、3話目では苦悩編とお送りしました。今回は完結編で、この製作実習の研修も大詰めです。果たしてロボットは無事に完成するのか?ぜひ温かい目でご覧ください。
張り付き機構改良後
3話目にて張り付き機構の改良を行い、当初のプロペラを使用して風力で張り付く方法から、ロボット内部に仕込んだ磁石の力で張り付く機構としました。しかし、ここで重大なことに気づきます。
あれっ、ホワイトボードに張り付かない・・・
なんと弊社の所有するホワイトボードは磁石がくっつかないタイプのホワイトボードでした。もう研修終了まで時間もなく、大幅な改良ができないため、ホワイトボード後ろにあった非常扉をホワイトボードに見立てて実験することにしました。
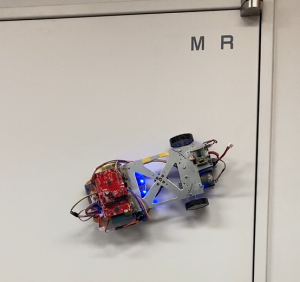
図1.非常扉に張り付いている様子
誤検知するセンサ
ロボットの形が完成し、実際に動かしていくと、様々思いもしない問題が発生しました。ロボット後方の赤外線センサが誤検知しているような動きがみられるようになりました。初めに問題の切り分けを行うために、プログラム上で後方センサを使用し検知していた処理を前方センサに置き換える、物理的に後方センサ基板と前方センサ基板を入れ替えるなど行いました。
結果、どちらも問題なく動作したため、ロボットに組み上げた状態のみ誤検知することが分かりました。
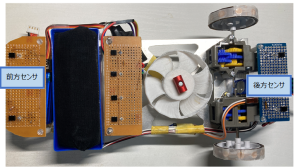
図2.組み立て後のロボット
その後、実験室で原因究明していると、
「モータ付近はモータから発せられるノイズの影響が大きいので、無視できない」
と先輩方からアドバイスを頂いたので、モータのノイズを測定することにしました。測定結果は以下図3の通りです。それぞれセンサ基板上の電源、GND、IO(センサ出力)の波形で、基準電位(オシロスコープのGND)はマイコンボード上のGNDとしております。
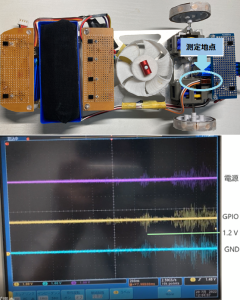
図3.モータからのノイズ測定(モータ加速時の測定)
図3のように瞬間にマイコンのHigh → Lowの閾値(立下り:1.2V程度)を下回っていることが分かり、センサ誤作動の原因がモータからのノイズであるとわかりました。
最終的な完成品
前章ではセンサ誤作動の原因がモータにあることが分かりました。しかし、これから改善するといったところで、本製作実習の期限が来てしまいました。結果、全自動でホワイトボードをクリーニングしてくれるロボットは完成しませんでしたが、少しアシストしてくれれば半自動で非常扉をお掃除してくれるロボットが完成しました(笑)
ロボットの完成形と動作結果を以下に示します。最後に研修の締めとして、製作実習発表会を社内で行い、壁に張り付くところのデモを行いました。先輩方からは実際に動いているところをデモ出来たおかげで、「おー」と言わせることができました。
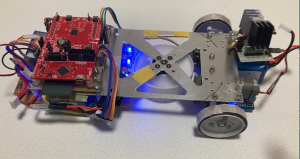
図4. 完成したロボット
完成したロボットの動作
実習を終えて
実習を終えて、完璧なものを作り上げることはできなかったですが、手作り感満載のオリジナルロボットを製作することができました。この実習を通して技術的な面で学ぶことが多かったのはもちろんですが、毎日出社して製作していたため、FAEの先輩方が出社した際に声をかけていただけたりして、最後にやってよかったといえる研修となりました。
本実習を通しての反省点は以下の通りです。
・当初の設計から、部品の入れ替えがかなりあった(モータ・センサ等)
・予備がなく必要数量ぴったり購入したものもあったので、壊れたら都度購入する必要があった。
・設計が甘く、1次試作で動くだろうという憶測で制作していた。
・当初機構設計が甘く、物理的に動くかわからないものであった。
まとめると、設計はしっかり理論の計算から行う、余裕を持った工程を心掛けることが大切だと学びました。
おわりに
こちらの技術記事は、弊社の新卒研修の一環で行っております製作実習の様子をお届けいたしました。最終的に当初の目標を100%達成することはできませんでしたが、壁に張り付いて動くロボットを製作することができました。この様子を全4話の配信でお送りいたしました。お読みいただきありがとうございます!
私自身も製作実習やこの記事の執筆を通して様々学んだことがありました。これから学んだことを生かしてまた新たなことにチャレンジしていきたいと思います!
それではまたどこかの記事でお会いいたしましょう!!