- 公開日:2024年09月02日
工数・コスト削減に有効な開発手法MBD(Model Based Development)とは? – 後編 –
- ライター:Masaya Ueda
- その他
前置き
前回の記事:工数・コスト削減に有効な開発手法MBD(Model Based Development)とは? – 前編 –
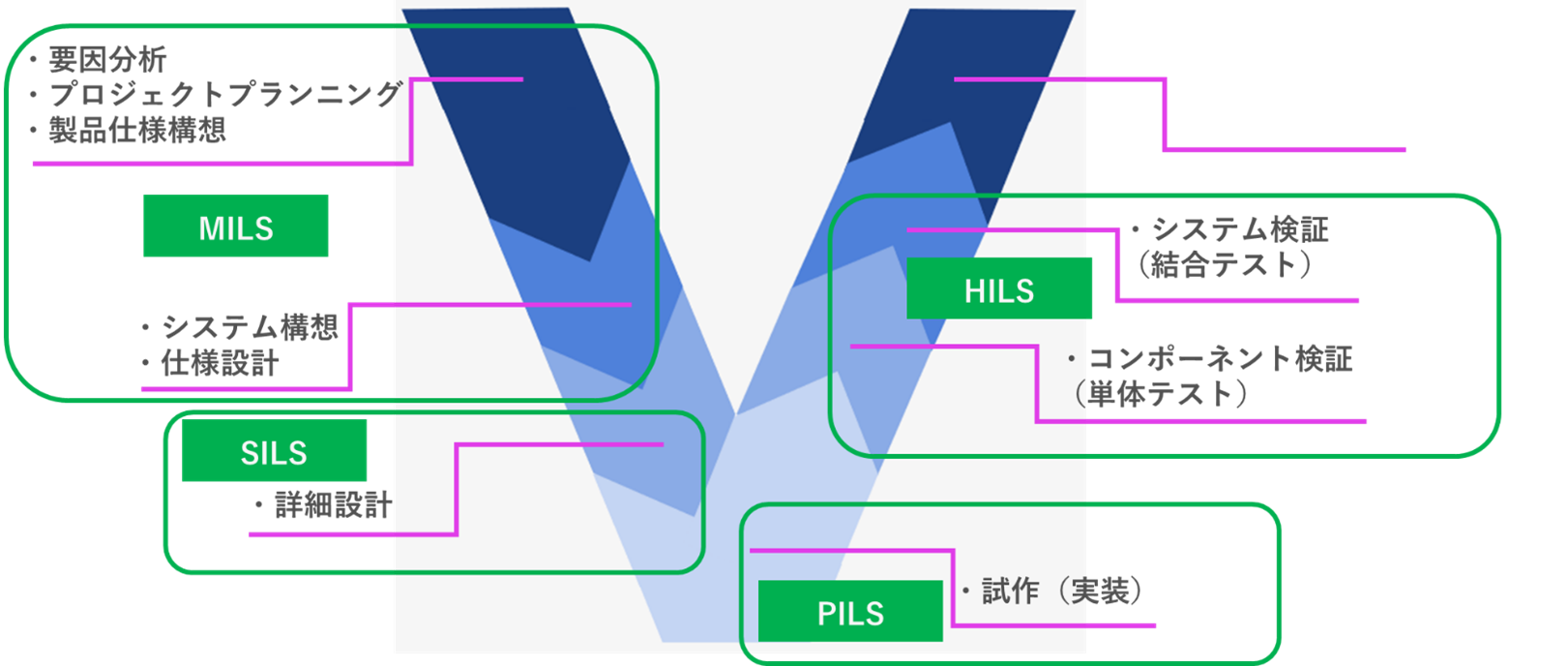
前編ではMBD (Model Based Development)の基本とトレンド、V字開発左側のPhaseにおける2つの手法MILS/SILSの解説をしました。今回はV字開発の実装以降のPhaseにおける手法PILS(Processor In the Loop Simulation)/HILS(Hardware In the Loop Simulation)についての解説と合わせてRenesasのMBDソリューションについての紹介をします。
PILS(Processor In the Loop Simulation)/HILS(Hardware In the Loop Simulation)の解説に入る前にMBD概要のおさらいを以下に示します。
【MBD概要】
MBDとは、開発する対象(制御するコントローラ側と制御対象であるプラント側も含む)の動作や構造を表現したモデルを用いてシミュレーションや検証を行う事で、システムを開発する手法です。これにより設計段階の問題点の早期発見や、検証の手戻りを削減することができるため、車載向けソフトウェア開発の分野では急速に需要が広がっています。
MBDの活用により主に以下のようなメリットがあります。
1.開発スピードの向上
2.品質の向上
3.コスト削減
各手法は、より前段や後段の手法と連携させることにより、開発全体を一貫してモデルベースで開発する事ができます。例えば、仕様のやりとりも以前までのドキュメントベースからモデルベースに変更する事で「動く仕様書」として扱えます。これにより要求仕様の取り違いや漏れのない仕様伝達が可能です。
MBD概要のおさらいをしたところでV字開発の実装以降のPhaseにおける手法PILS(Processor In the Loop Simulation)/HILS(Hardware In the Loop Simulation)について解説します。
HILS (Hardware In the Loop Simulation)とは
V字開発の流れにおいては前後しますが説明の都合上、先にHILS (Hardware In the Loop Simulation)について説明します。HILSはV字開発の検証(テスト)のPhaseで用いられるMBD手法で、制御対象プラントはモデルを、制御コントローラは実機ECUを使用します。
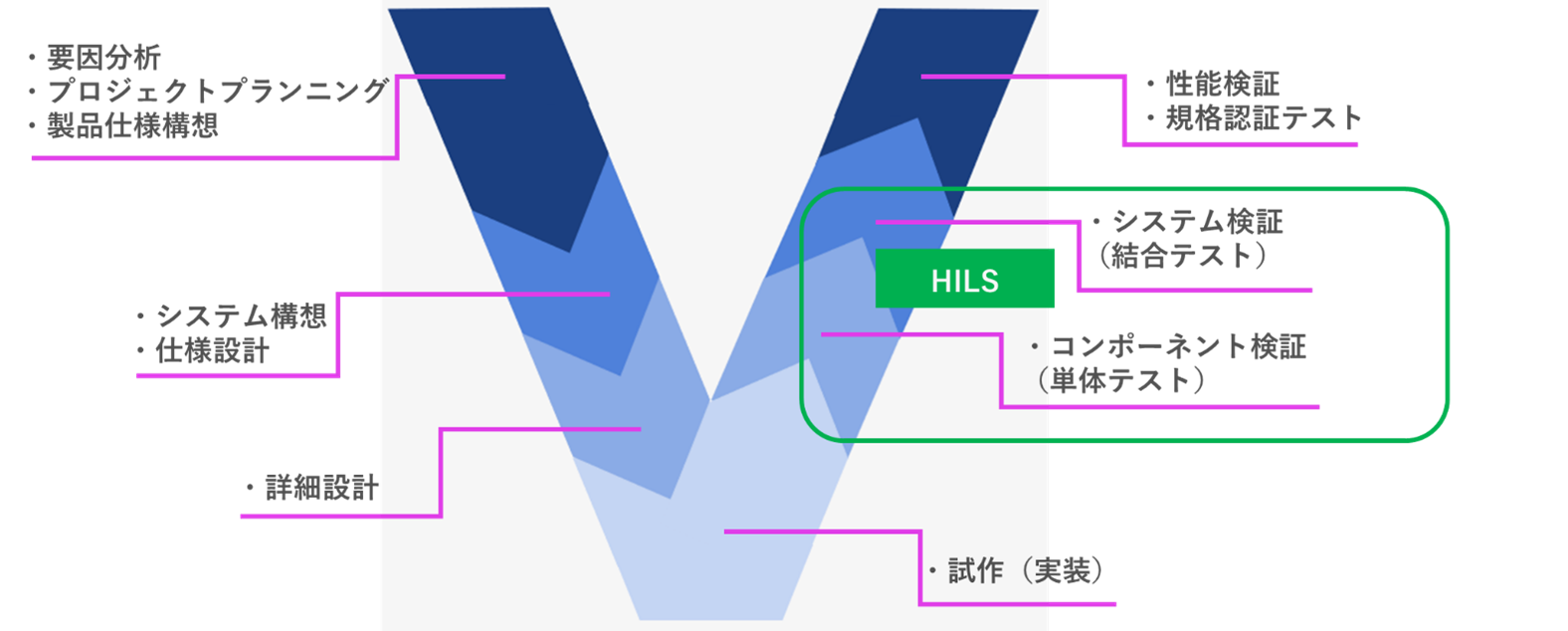
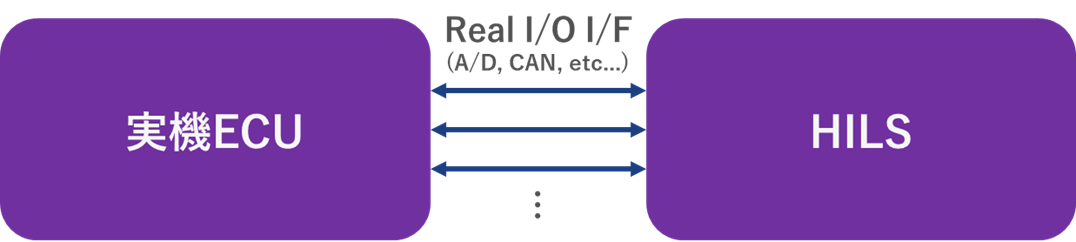
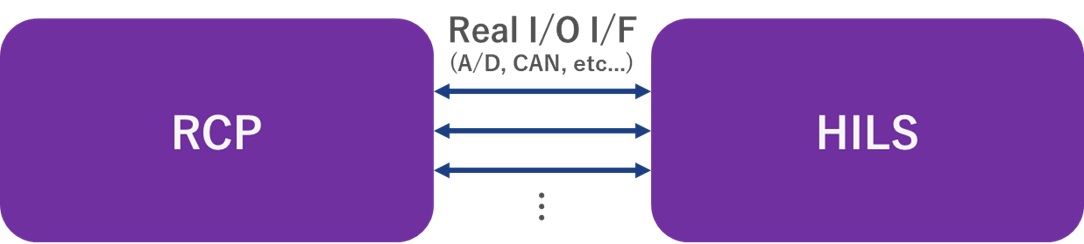
制御コントローラとして実機ECUを使用するため、制御対象プラントモデルはリアルタイムで動作する必要があります。そこで、制御対象プラントモデルをリアルタイム動作のためのシミュレーション専用のコンピュータ上に実装します。dSPACE社のSCALEXIOやデンソーテン社のCRAMASが定番のツールとなります。HILSはA/DやCAN等のReal I/O I/Fを備えており、実機ECUとの接続が可能です。リアルタイムでのシミュレーションが可能なため最終的な結合・システムテストにおけるシミュレーション手法として用いることが可能となります。
PILS (Processor In the Loop Simulation)とは
PILS (Processor In the Loop Simulation)はV字開発の試作(実装)のPhaseで用いられるMBD手法です。制御対象プラントはモデル、制御コントローラはRCP(Rapid Control Prototyping)を使用します。
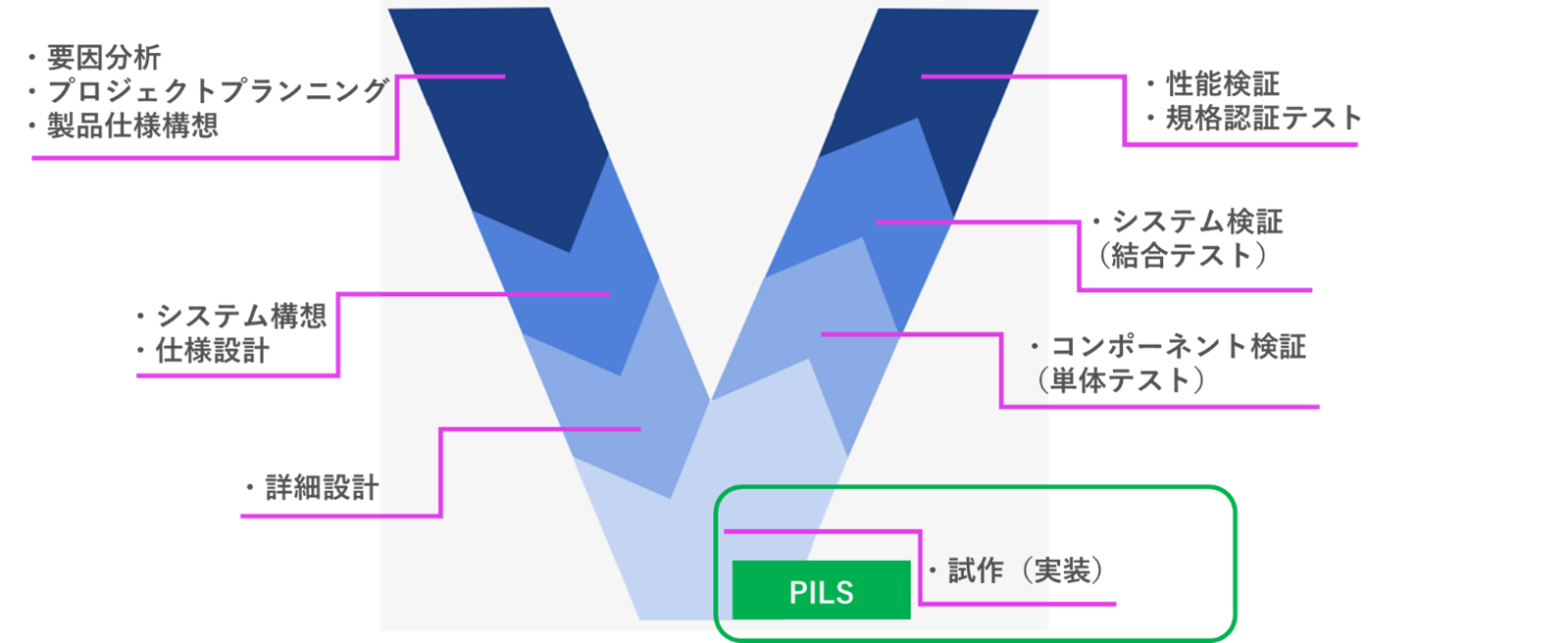
RCPとは制御コントローラのモデルを実行コードにコンパイルしてリアルタイムシミュレーション可能な専用コンピュータに実装した汎用ECUとなります。PILSはHILSとに近い構成とはなりますが実機ECU ではなくRCPを用いより汎用的な検証を行う手法となります。RCPはdSPACE社のMicroAutoBoxが定番ツールとなります。実コードを用いるため試作(実装)におけるシミュレーション手法として用いられます。
Renesas Electronics MBDソリューション紹介
これまでの解説にてMBDの基本について理解して頂けたかと思います。我々の扱うRenesas ElectronicsでもMBDソリューションを幾つか扱っておりますので最後にRenesasのMBDソリューションについてご紹介します。
今回は以下の代表的な2つのMBD環境についてご紹介します。
1.Embedded Target
2.Virtual Platform
1.Embedded Target
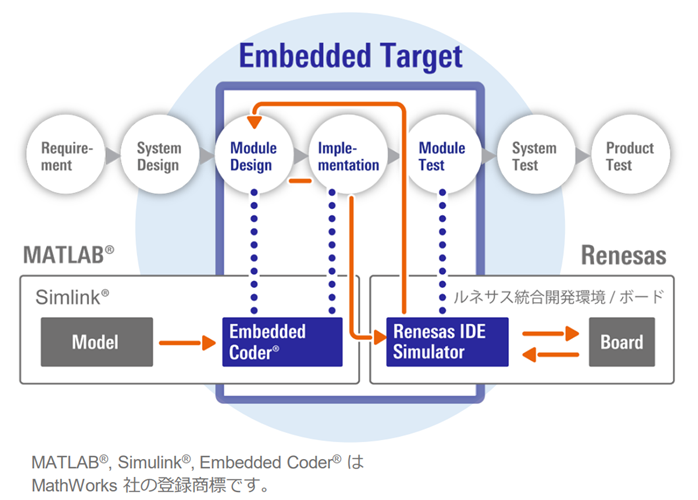
Embedded TargetはMATLAB Simulink®にて作成のモデルからターゲットデバイスの並列コード及びPILS(Processor In the Loop Simulation)環境を自動構築、生成するMATLAB®連携環境です。
PILSシミュレーションの環境構築からモデル性能検証までをシームレスに実行可能なツールでRenesas MCUのソフトウェア開発の工数削減を実現します。
引用:ルネサスエレクトロニクス(株).「[パンフレット]Embedded Target」.
https://www.renesas.com/jp/ja/document/fly/flyer-embedded-target?r=488836
Embedded TargetのラインナップとしてはRA/RL78/RX向けのEmbedded TargetとRH850向けかつマルチコア対応・イーソル社のモデルベース並列化ツールeMBPとの連携が可能なEmbedded Target for RH850 (Multicore)、後ほどご紹介のVirtual Platformとの連携シミュレーションが可能なEmbedded Target for RH850/R-Car Virtual Platformが御座います。
各ツールの詳細については以下のパンフレットをご参照ください。
・RA, RL78, RXファミリ用モデルベース開発環境 [Embedded Target]:https://www.renesas.com/jp/ja/document/fly/flyer-embedded-target?r=488836
・RH850 マルチコア・モデルベース開発環境 [Embedded Target for RH850 Multicore]:https://www.renesas.com/jp/ja/document/fly/flyer-rh850-multicore-model-based-environment?r=1169841
・RH850, R-Car ファミリ用モデルベース開発環境 [Embedded Target for Virtual Platform]:https://www.renesas.com/jp/ja/document/fly/flyer-rh850-model-based-environment-embedded-target-rh850-virtual-platform?r=1636366
2.Virtual Platform
Virtual Platform(VPF)はRenesasのパートナーであるシノプシス/ASTC社より提供されるより実デバイスに忠実な抽象度の高い高精度なシミュレーションモデルツールで、実デバイスのサンプル提供等に先駆けてリリース可能なため早期開発着手が可能となり、以下の特長を持ちます。
・実デバイスに準じたコアモデルを備えており、実コードの実行が可能
・デバイスの周辺レジスタやDRAMなどのメモリ空間へのアクセス(Read/Write)が可能
・アドレスマップおよび演算精度は対応するデバイスに一致
RenesasデバイスのVirtual Platform(VPF)はシノプシス社のVDK(Virtualizer Development Kit)とASTC社のVLABの2つのツールが御座います。
各ツールの詳細につきましては下記2社の製品ページを参照ください。弊社にて2社ともにコンタクトがあり、製品のご説明、ご紹介等可能ですのでお問合せ下さい。
・シノプシス社VDK(Virtualizer Development Kit):https://www.synopsys.com/ja-jp/verification/virtual-prototyping/vdk.html
・ASTC社VLAB:https://vlabworks.com/
お問い合わせ
ルネサス製品をお探しの方は、メーカーページもぜひご覧ください。
ルネサス エレクトロニクス株式会社 (Renesas Electronics Corporation)
Renesas Electronics Corporation – 半導体事業 – マクニカ (macnica.co.jp)