- 公開日:2024年11月28日
- | 更新日:2024年11月29日
インダクティブポジションセンサー キャリブレーション設計手法
- ライター:Kenji Ono
- センサー
はじめに
ルネサスエレクトロニクス(以下、ルネサス)社製インダクティブポジションセンサーを使用して、物体の位置検出を行うことが可能です。モーターであれば回転位置、アクチュエーターであれば可動位置、その適用範囲は様々で、お客様のアプリケーションにマッチしたコイルパターンでの実現が可能となります。その位置のセンシング精度を高めるのに必要になってくるのが開発設計においてのキャリブレーションです。ルネサス製インダクティブポジションセンサーのIPS2550EVMを使用して、キャリブレーション手順を説明します。
インダクティブポジションセンサー評価キット
ルネサス社では、IPS2550を使用して簡易的に動作確認が可能な評価キットを用意しています。IPS2550STKITは高速モーター回転制御向けの車載用誘導型位置センサー、IPS2550による迅速かつ容易に評価を可能とするコンパクトで直観的な評価キットです。また、評価キットを使用して作成したコイルパターンとターゲット金属とのマッチングを取るキャリブレーションが可能です。
※購入については、ルネサスHPもしくは当社へご連絡ください。
◆IPS2550 Starter Kit同梱包品
①IPS2550MROT4X90001sensor module
IC(IPS2550)が搭載されたコイルパターン基板の上部に検知用回転体が付いています。手動で軸を回転制御することができます。

②IPS-COMBOARD
IPS2550から出力されるサインとコサインの信号を通信ボードで受け、PCへと接続します。
③Micro B USB cable
通信ボードとPCとの接続用
④Two 10pin ribbon cables
IPS2550MROT4X90001sensor moduleとIPS-COMBOARD(通信ボード)接続用
GUIツール
評価ボードを動作させるにはPCと接続させて、GUI画面により設定と動作させることが必要です。
ツールはルネサス社HPから無料でダウンロード可能です。
Download Link:
以下が接続時のGUI画面となります。IPS2550 Starter Kitに同梱されているsensor moduleでキャリブレーション済の
デフォルト値にセットされている為、すぐに動作させて確認が可能です。

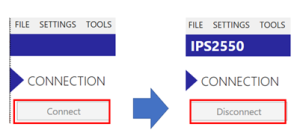
<STEP1>
PCとEVMをUSBケーブルで接続すると、Connectがクリックできるようになるので、クリックすることでツールとGUIが接続された状態になります。接続状態になると、“Connect”ボタン表示が“Disconnect”の選択できるように表示が変わります。
設定はDefaultでOKです
<STEP2>
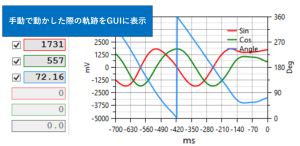
EVMでは手動で回転させるので、 Use Triggerチェックなしで“START“ボタンをクリック。
STARTを推した後、センシング開始。ターゲットの位置をセンシングし、Sin・Cos・基準位置からの角度が表示されます。
700ms前からのセンシング結果がGUIに表示されます。
ENMに同梱されている基板を使用して動作確認を行うには上記手順により簡単に動作することが可能です。
キャリブレーション手順
実際にモーター等の回転体に取り付けてセンシングする際は、コイルパターンとターゲットにおいての各種調整が必要になります。
GUIツール上で数値調整することで、各種作成したコイルパターンとターゲットの最適化が可能です。
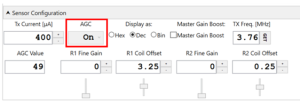
まず、AGC(Default : On)を無効にします。
ツール画面上で作成したコイルパターンとターゲットとの調整値をファイルとして保存し、最適な設定を製品化時にセットが可能です。
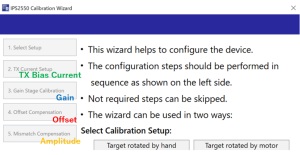
それぞれの調整手順を説明していきます。
GUI上にあるキャリブレーション手順に沿って行うことで最適値への調整が可能です。

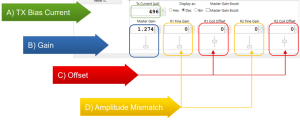
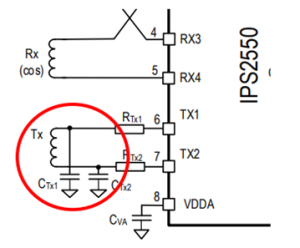
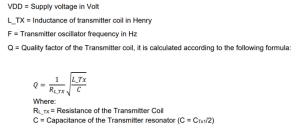
A)Tx Bias Current
Defaultのままにする、もしくは以下計算式により算出します。
![]()
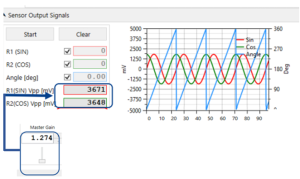
B)Gain
AGC有効にする場合は不要ですが、AGC無効にする場合、目的の出力振幅に合わせてマスターゲインを調整します。
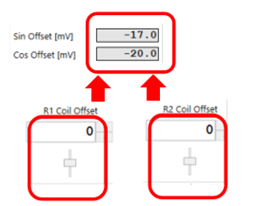
C)Offset
オフセットが「0」に近づくまでコイルオフセット補正を調整します。
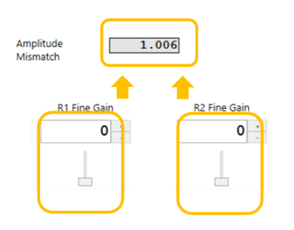
D)Amplitude
振幅不一致が「1」に近づくまでファインゲイン補正を調整します。
最後に、必要に応じてAGCを再度有効にし、“Write FTP”をクリックします。
作成したFTPはツールを介して設定されます。
Auto Gain Control (AGC)について
デフォルトでは、自動ゲイン制御はアクティブです。AGCは、内部の振幅検出器の信号を使用して、IPS2550データシートドキュメントで定義されているように、コントロールウィンドウへの信号振幅を制御する機能です。
AGCは、デフォルトで使用可能な全てのステップを使用します。アクティブになっている場合、AGCは妥当性範囲内のゲインステップのみを使用します。アプリケーションによっては、静的なゲイン設定が必要な場合があります。この場合、AGCを無効にする必要があります。電源投入後、AGCはR1/R2に設定されたゲイン値から動作を開始します。
最後に
ルネサス社が提供するインダクティブポジションセンサーは、ユーザー側で作成したアプリケーションにマッチした形のコイルパターンとターゲットを構成しても設計の段階で、その形状に最適な特性が得るようにキャリブレーションを実施する必要があります。
キャリブレーションをルネサスが無償で提供するGUIツールで行うことを説明しました。ぜひ、ポジションセンシングを検討されている方はルネサス製インダクティブポジションセンサーをご検討ください。
ユーザー側で設計する際に参考となるコイルデザインカタログやリファレンスデザインもルネサス社は提供しております。
- PCBコイルデザイン(Resolver 4.0 catalog)
- リファレンスデザイン
ルネサス製品をお探しの方は、メーカーページもぜひご覧ください。
出典
- IPS2550データシート https://www.renesas.com/jp/ja/document/dst/ips2550-datasheet
- IPS2550STKIT https://www.renesas.com/jp/ja/products/sensor-products/position-sensors/ips2550stkit-evaluation-kit-ips2550
- Resolver 4.0 Catalog https://www.renesas.com/jp/ja/document/oth/resolver-40-catalog
- Programming Manual https://www.renesas.com/ja/document/gde/ips2550stkit-getting-started