- 公開日:2025年03月25日
- | 更新日:2025年05月19日
ビギナーのためのCAN通信基礎
CAN通信とは
CANとは、Controller Area Networkの略称であり、1980年台にドイツのボッシュ社によって開発された通信プロトコルです。
主に車載ネットワークで使用されておりますが、車載用途だけでなく産業用ネットワーク等でも利用されております。
CAN通信には以下のようなメリット/デメリットがあります。
-メリット
・シンプルで設計が容易に行ことができる
・容易にCANノードを追加できる
・耐ノイズ性に優れている
-デメリット
・バスが断線に弱い
CANノードの構成
CANノードとは、CANネットワークに接続される通信機器のことを指します。CANノードは以下の赤枠のような構成となっております。
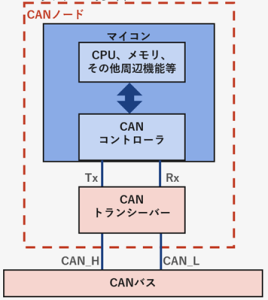
CANコントローラ内蔵のマイコンおよびCANトランシーバーが必要となります。そして、CANトランシーバーをCANバスに接続して、各ノード間で通信を行います。また、CAN通信は二線(CAN_H,CAN_L)を用いて差動信号方式にて通信を行います。
送信時
送信時においては、マイコン内蔵のCANコントローラを用いてCANトランシーバーへデジタル信号を送信し、CANトランシーバーにて二線(CAN_H,CAN_L)の信号に変換しCANバスへ送信します。
受信時
受信時においては、送信時の逆でCANトランシーバーにて二線(CAN_H,CAN_L)の信号からデジタル信号へ変換した後、CANトランシーバーからマイコンへデジタル信号を送信します。マイコン内蔵のCANコントローラにてデジタル信号を受信し必要に応じて受信データを使用します。
CAN通信の特徴
CAN通信は以下のような特徴を有しています。
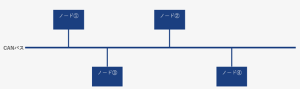
・ライン型の構造
以下の図のように、トポロジーがライン型の構造となっているため、シンプルかつ省配線化可能です。
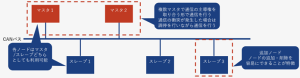
・マルチ・マスター方式
どのノードもマスタおよびスレーブになることができます。また、複数マスタで通信の主導権を奪い合いながら通信を行うためイベント指向通信に向いています。このような特徴ノードの追加・削除も容易に行うことが出来ます。
その他、CRC等複数のエラー検出機構を有しており、通常のシリアル通信よりもエラー検出機能が優れております。
おススメ製品
ルネサスエレクトロニクス社のCANコントローラ内蔵MCUのラインナップについては下記をご確認ください。
・RXファミリ(ルネサス独自のCPUを搭載したMCU):プロダクトセレクタ: RX 32ビット高性能・高効率MCU | Renesas ルネサス
・RAファミリ(Armコアを搭載したMCU):プロダクトセレクタ: RA Arm Cortex-M MCU | Renesas ルネサス
お問い合わせはこちら
ルネサス製品をお探しの方は、メーカーページもぜひご覧ください