- 公開日:2025年09月09日
- | 更新日:2025年09月30日
車載SoCで使われる電力制御技術
- ライター:Hideki Hara
- プロセッサー
車載SoCでよく使われる電力制御技術をご紹介します。
はじめに
車載SoCではなぜ電力制御が必要なのでしょうか?
それは車両に搭載されるECU(Electric Control Unit)の課題を解決するためにSoCに対して省電力対応を求められるためです。
主な課題は以下の通りです。
|
課題 |
|
| ECUの消費電力 | ・OEMから動作時・待機時の消費電力要件を規定される場合がある。 ・ECUの仕様要件によって機能ごとに動作・未動作を設定して適正な消費電力で動作させる必要がある。 ・SoCは(マイコンに比べ)高温動作時消費電力が大きく増大する。 ・(マイコンに比べ)回路規模が大きいためリーク電流も大きい。 |
| ECUの放熱設計 | ・SoCの消費電力に比例して冷却方式を検討する必要がある。 ・自然空冷・筐体経由での放熱・空冷ファン・水冷等、放熱機構によりECU価格に影響を与える。 |
車載SoCで使われる電力制御技術
車載SoCで使われる電力制御技術は以下に記載するような技術があります。
それぞれの技術にメリット・デメリットがあるため、SoCの仕様に合わせて採用される技術が検討されます。
| 制御技術 | 概要 |
| クロックゲーティング | 各モジュール対して供給されるクロックのON/OFFを制御する。 |
| モジュールリセット | 各モジュールに対してリセット状態のON/OFFを制御する。 |
| 電源スイッチ | 各モジュール対して供給される電源のON/OFFを制御する。 |
| AVS(Adaptive Voltage Scaling) | 各デバイスのプロセスばらつき状態に応じて適切な動作電圧を判定し最適な電力提供を実現する。 |
| DVFS(Dynamic Voltage and Frequency Scaling) | CPUの動作状態を動的に判定し、CPUの動作周波数と動作電圧を制御する。 |
| Multi Core | CPU(GPUやNPUも含む)のマルチコアをシステムの負荷の応じてON/OFF制御する。 |
| Multi CPU | システムの処理内容に最適な複数種のCPUを配置し、システムの動作状態の応じてそれぞれのCPUを適切に制御する。 |
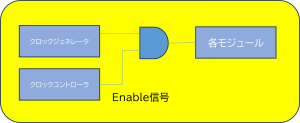
クロックゲーティング
クロックコントローラを制御して、各モジュールへのクロック供給をON/OFFすることで動作電流を低減する方式です。
| 特徴 | |
| メリット | ・ON/OFFの制御にかかわる時間が短い(レジスタ設定とクロック安定時間のみ)。
・動作状態で停止・動作状態から再開できる(但し、モジュールの動作方法にも依存する)ため、再初期化が不要(な場合がある)。 |
| デメリット | ・ダイナミック電流しか抑えられない。 |
実現方法
①ARMコア:WFI/WFE命令(*1)によってクロックゲーティングを有効化します。
②GPU(*2)など:ファームウェア等でクロックゲーティングを制御するケースがあります。
③各モジュール:ドライバでクロックコントローラを制御したり、電源制御用プロセッサでクロックコントローラを制御します。
(*1)WFI: Wait For Interrupt、WFE: Wait For Event
(*2)GPU: Graphic Processing Unit
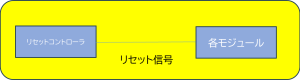
モジュールリセット
リセットコントローラを制御して、各モジュールへのリセット状態をON/OFFすることで動作電流を低減する方式です。
| 特徴 | |
| メリット | ・ON/OFFの制御にかかわる時間が短い(レジスタ設定とリセット制御時間のみ)。
・動作状態で停止(リセット)できる。 |
| デメリット | ・ダイナミック電流しか抑えられない。
・動作中のリセットが誤動作とならないかケアが必要(通信中の状態等)。 ・レジスタ状態がリセットされるため、動作再開時は再初期化が必要。 |
実現方法
リセットコントローラを制御します。
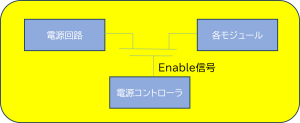
電源スイッチ
電源コントローラを制御して、各モジュールへの電源供給をON/OFFすることで消費電流を低減する方式です。
| 特徴 | |
| メリット | ・ダイナミック電流だけでなくリーク電流も抑えられる。 |
| デメリット | ・ON/OFFの制御にかかわる時間が比較的長い(電源安定待ちが必要)。
・制御方法が複雑な場合がある(電源ON/OFFシーケンスを守る必要がある)。 ・専用のPMIC(*)が必要な場合がある。 (*) Power Management IC |
実現方法
電源コントローラを制御します。
AVS(Adaptive Voltage Scaling)
各デバイスのプロセスばらつき状態に応じて適切な動作電圧を判定し電源供給することで消費電流を低減する方式です。
| 特徴 | |
| メリット | ・個々のデバイスの状態に合わせた最適な電圧設定が可能。(過剰な消費電力を抑えられる) |
| デメリット | ・個々のデバイスでAVSを使うための情報(レジスタ)を準備する必要がある。
(ハードウェアの機構・出荷時書き込み対応等が必要) ・AVSのハードウェア機構に対応した専用のPMICが必要。 ・ECUごとに動作条件が異なる(メーカー側の評価工数増)。 |
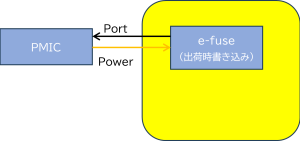
実現方法
実現方法の1例を示します。
①出荷時にAVSの情報をe-fuseに書き込む。
②AVS用の端子(PMICとのIF)を使用。
③専用PMICを使用。
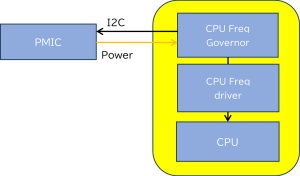
DVFS(Dynamic Voltage and Frequency Scaling)
CPUの動作状態にあわせて最適な電圧条件で最適な周波数での動作を実現することで消費電流を低減する方式です。
| 特徴 | |
| メリット | ・最適な電圧条件下で最適な周波数動作を行うため、消費電力を最適化できる。
・動作モードに合わせた条件で制御を行うことができる。 ・(チップ内)温度センサと組み合わせた制御も可能。 |
| デメリット | ・DVFSに対応したソフトウェアの実装が必要。
・電力効率は制御方法に依存(電力効率化と制御の複雑化は反比例)。 ・DVFSに対応したPMICが必要。 |
実現方法
実現方法の1例を示します。
①CPU Freq Governor/driverを実装 (*)。
②I2C通信(PMICとのIF)で電圧設定。
③専用PMICを使用。
(*)CPU Freq Governor(スケジューラによって、動作モード・CPU負荷状態を監視し、ドライバを制御)
CPU Freq driver(CPUの周波数制御を行うドライバ)
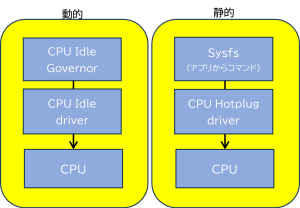
Multi Core
システムの負荷状態にあわせて動作CPUコア数の増減を制御することで消費電流を低減する方式です。
| 特徴 | |
| メリット | ・最適な動作条件下で最適なコア数制御を行うため、消費電力を最適化できる。
・動作モードに合わせた条件で制御を行うことができる。 ・静的・動的どちらでも制御可能。 ・PMICの制御不要。 |
| デメリット | ・コアのON/OFF制御に対応したソフトウェア(OS,ドライバ)の実装が必要。
・電力効率は制御方法に依存(電力効率化と制御の複雑化は反比例)。 |
実現方法
実現方法の1例を示します。
①CPU Idle Governor+CPU Idle driver(動的制御)(*1)
または、
②sysfs(*2)+CPU Hotplug driver(静的制御) (*3)
を使用します。
(*1)CPU Idle Governor(スケジューラによって、CPU負荷状態を監視し、ドライバを制御)
CPU Idle driver(CPUのrun(動作状態)/standby(停止状態)の制御を行うドライバ)
(*2)sysfs : Linuxの仮想ファイルシステムの名称です。sys/devices/system/cpuディレクトリにCPUのシステム情報が格納されています。
ファイルに対するコマンド操作によりドライバへ情報を通知する仕組みです。
(*3)CPU Hotplug driver(CPUのonline(動作状態)/offline(停止状態)の制御を行うドライバ)
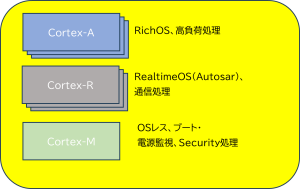
Multi CPU
システムの処理内容に最適な複数種のCPUを配置し、システムの動作状態の応じてそれぞれのCPUを適切に制御することで消費電流を低減する方式です。
| 特徴 | |
| メリット | ・最適な動作条件下で最適な複数種のCPUの制御を行うため、消費電力を最適化できる。
・動作モードに合わせた条件で制御を行うことができる。 ・(CPUによっては)静的・動的どちらでも制御可能。 |
| デメリット | ・デバイス(SoC)の仕様に依存。
・ソフトウェアのアーキテクチャの検討が必要(複数OS/ドライバ、機能配置等)。 |
実現方法
実現方法の1例を示します。
システム用途にあわせて、Cortex-A、Cortex-R、Cortex-Mの各CPUを配置します。
Renesasの車載SoC
さいごに、Renesasでは自動運転、ADAS、コックピット等の幅広いアプリケーションに向けたSoCとして、
「R-Carファミリ」をラインナップしております。
お客様向けの評価ボード等もご準備しておりますので是非弊社までお問い合せ下さい。
R-Car自動車用SoC (System-on-Chip) | Renesas ルネサス