- 公開日:2025年09月10日
- | 更新日:2025年10月07日
車載マイコンの低消費電力モード
- ライター:Kimura
- マイコン
低消費電力モードとは
マイコンの低消費電力モード(スタンバイモード)とは、マイコンの消費電力を抑えるために動作状態を制御するモードのことを指します。
では、なぜ消費電力を抑える必要があるのでしょうか?
近年の車では、多くの部品がECU(Electronic Control Unit)により電子制御されております。
車両の電源は主にバッテリーから供給されるため、低消費電力モードを活用することでバッテリー消費を抑え、車両の稼働時間を延ばすことができます。特に、電気自動車やハイブリッド車では、バッテリーの効率的な使用が重要になるため、利用ケースに合わせて消費電力を抑える必要があります。
低消費電力モードの種類
早速、どのようなモードがあるのか見ていきましょう。
今回は、ルネサスエレクトロニクス製のRH850/U2Aを例にして、各モードの違いをご紹介いたします。
U2Aシリーズでは、動作モードとして「RUNモード」、「STOPモード」、「DeepSTOPモード」、「Cyclic RUNモード」、「Cyclic STOPモード」が用意されております。以下で各スタンバイモード時の電源のON/OFF状態、CPUの動作状態を説明します。
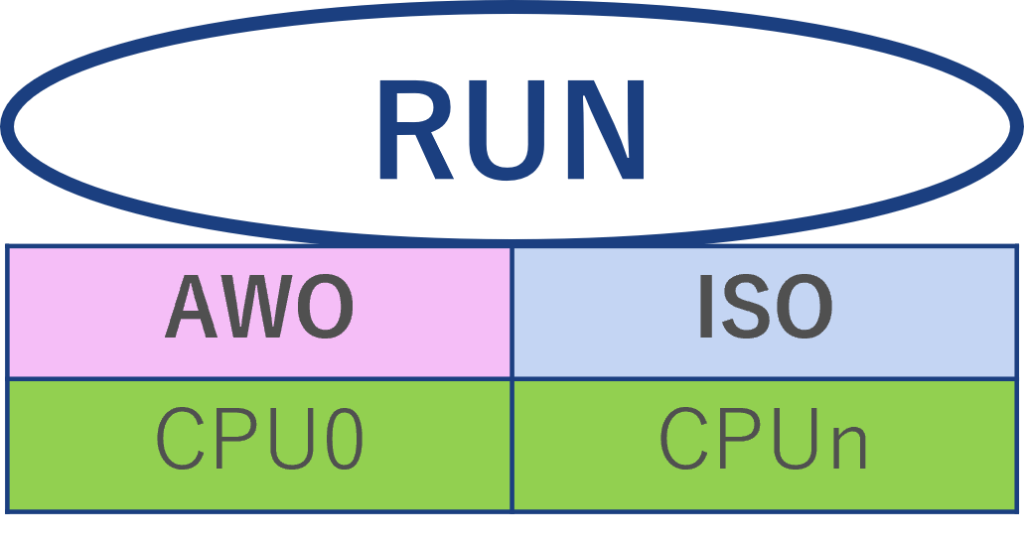
RUNモード
スタンバイモードではありませんが、マイコンが動作する際の基本的な動作モードになります。
このモードでは、すべての電源が入っている状態であり、全CPUとモジュール(周辺機能)が動作可能な通常動作モードです。
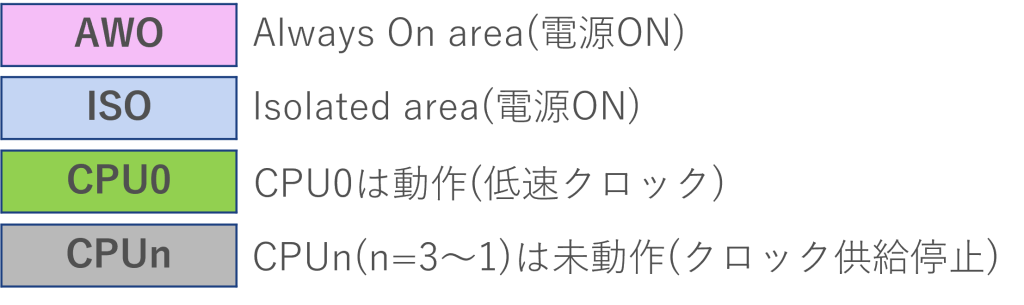
下図のAWO(Always On area)やISO(Isolated area)はマイコンに供給される電源領域を指していて、AWOは常にマイコンに供給されるエリア、ISOはモードによって電源を遮断できるエリアになります。
※ユースケース例:車両走行中
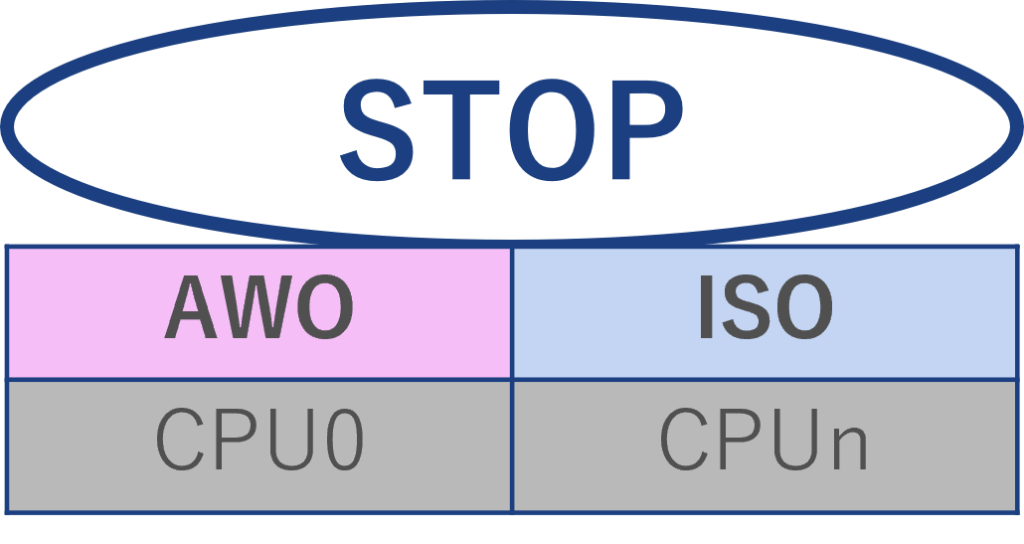
STOPモード
RUNモードから遷移できるチップレベルのスタンバイモードで、特定のクロック供給を停止できます。
このモードでは、CPUへのクロック供給が停止するのでCPUは動作しません。
※ユースケース例:アイドリングストップなどの短時間のエンジン停止

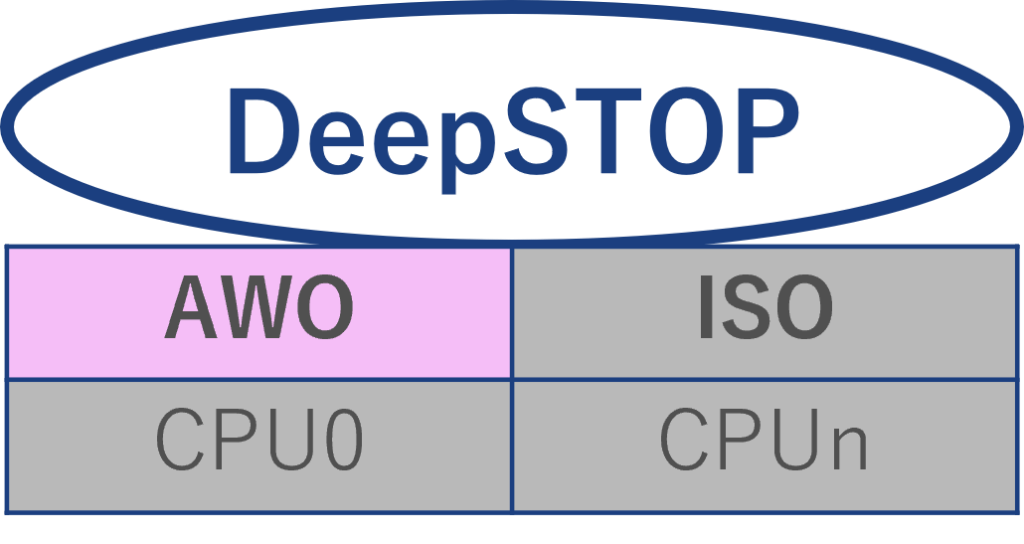
DeepSTOPモード
RUNモードまたは、CyClic RUNモードから遷移できるモードで、STOPモードよりもさらに消費電力を削減できるチップレベルのスタンバイモードです。
クロック供給の停止に加えて、ISOエリアへの電源供給もオフになる動作中で一番消費電力が低いモードになります。
※ユースケース例:長時間の駐車

Cyclic RUNモード / Cyclic STOPモード
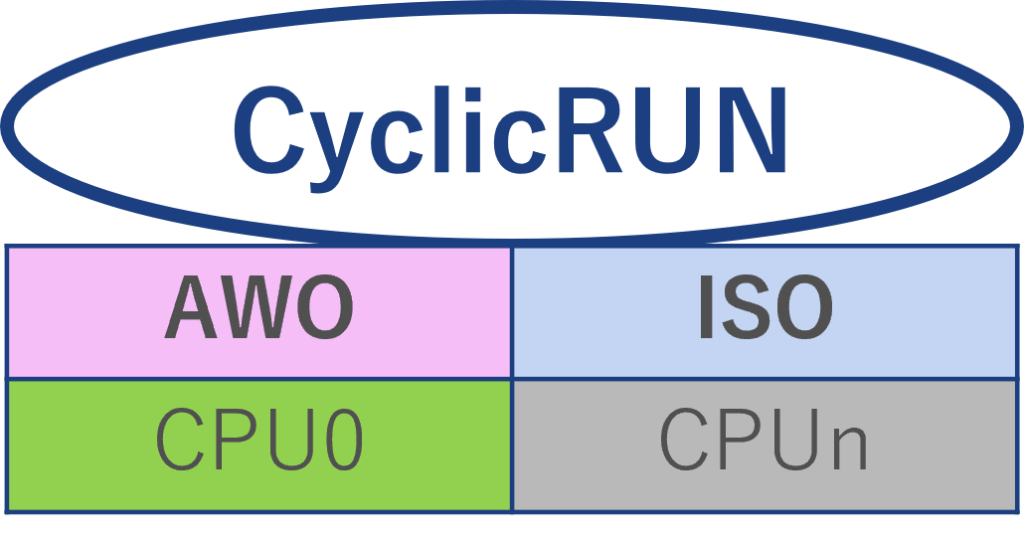
■Cyclic RUNモード
DeepSTOPモードから遷移できるモードで、限定されたモジュールが低速で動作できるスタンバイモードです。
このモードでは、CPU0、AWOエリアの周辺機能、ISOエリアのRLIN3、MSPIが動作可能です。
RLIN3やMSPIによって、周辺センサー値等を周期的に見ることで車両状態を監視する用途があります。
また、このモードでは、データ/コードフラッシュメモリとPLLは利用できません。
※ユースケース例:周期的な車両状態の監視(Cyclic STOPモードとの切替)
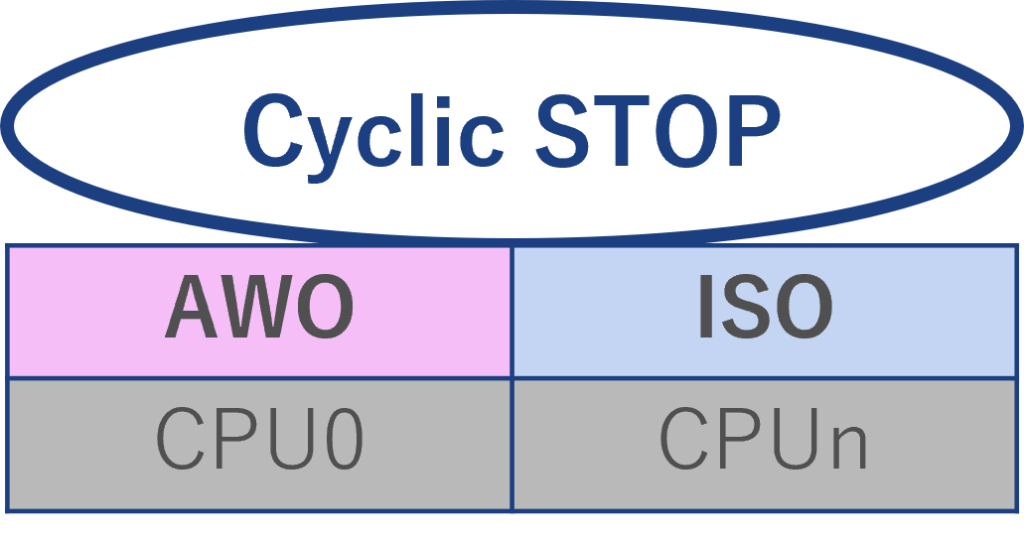
■Cyclic STOPモード
Cyclic RUNモードから遷移できるスタンバイモードになります。
Cyclic RUNモードで動作していたCPU0(PE0)の動作を停止します。

モードまとめ
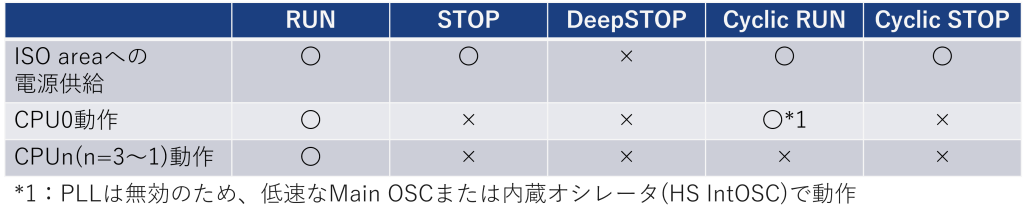
各モードの違いをISO領域への電源供給、CPUの動作の観点でまとめてみました。
STOPモードとCyclic STOPモードには一見違いが無いように見えますが、STOPモードでは、CANモジュールの動作が可能となります。
モードの遷移
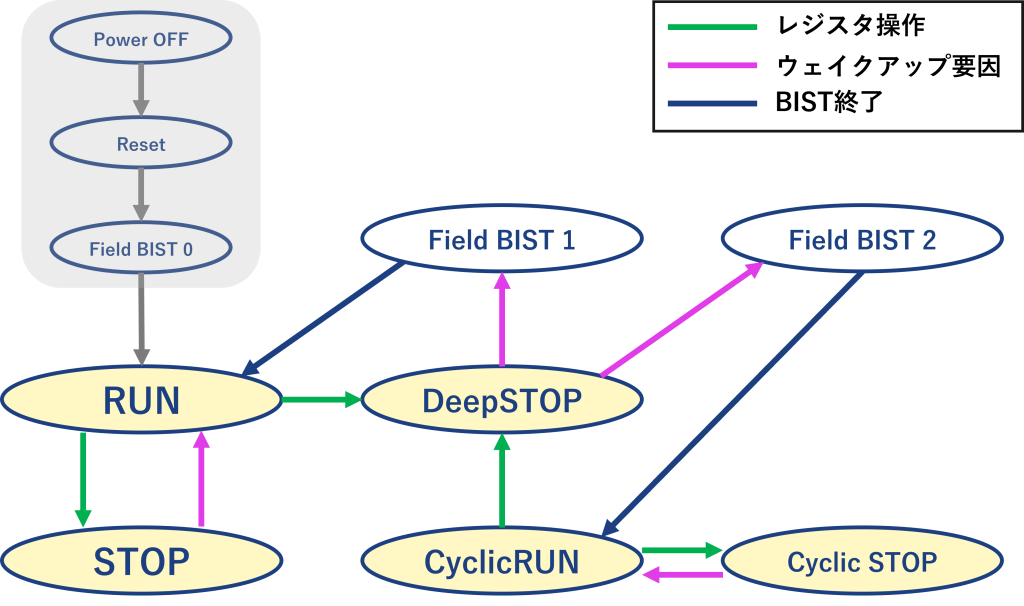
各モードは、どのモードからでも遷移できるわけではなく、「STOPモードはRUNモードから遷移」というように遷移元と遷移先が決まっています。下図は各モードの遷移図になります。
「RUNモード」、「Cyclic RUNモード」から各STOPモードへの遷移はモード遷移の制御を行うStanby Controllerのレジスタ操作により実現します。各STOPモードから復帰する際はウェイクアップ要因と呼ばれるGPIO, タイマ, A/D入力, CANなどの外部信号を検知して、これが各STOPモードから復帰するトリガとなりRUNモードやCyclic RUNモードに復帰します。どのウェイクアップ信号で復帰するかは選択可能です。
また下図では、上記で紹介したモード以外に「Field BIST」というものがあるかと思います。DeepSTOPから復帰する際にはすぐにRUNモードやCyclic RUNモードに移行するわけではなく、DeepSTOPリセットが発生してBIST(Built-In Self-Test)の実行を挟みます。
BISTとはマイコンの故障を検出する機能で、Logic BIST(LBIST)とMemory BIST(MBIST)で構成されています。簡単に言うと、LBISTでマイコン内部の回路が期待通りに動作するか、MBISTでROMやRAMに異常がないかを確認しています。
各モードの消費電流
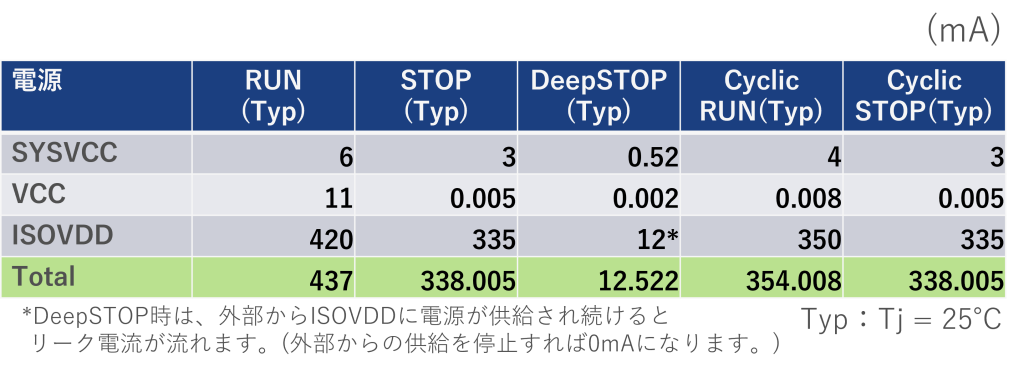
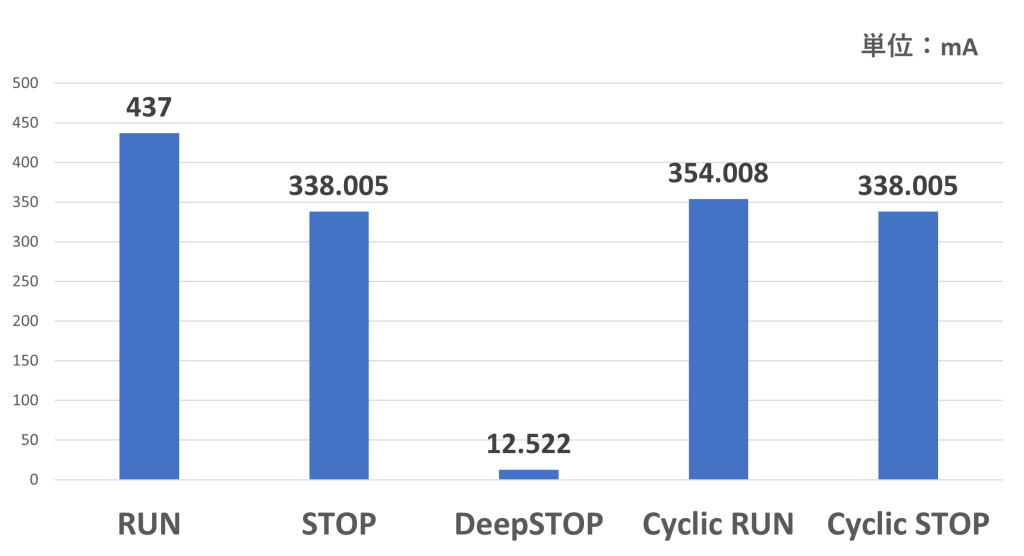
下の表はマニュアルの電気的特性から抽出したRH850/U2A16(*)の各モードにおける消費電流になります。
SYSVCC、VCC、ISOVDDはU2Aの電源であり、SYSVCCはシステムロジックなどのAWO領域の電源供給、VCCはフラッシュメモリなどの内部回路の電源供給、ISOVDDはCPU含めたISO領域の回路への電源供給を行っています。
特にDeepSTOPモードではISOエリアの電源が落とされ、CPUも動作していないため、他のモードに比べて大幅に消費電流が落ちることが分かります。
*ちなみに、U2AシリーズにはU2A16、U2A8、U2A6がありますが、U2A16であれば16MBといったように末尾の数字がコードフラッシュのサイズを示しています。U2A-EVAもありますが、これは評価用のデバイスで、通常のJTAG I/Fとは別にU2A-EVAのみにあるデバッグ用のI/FやRAMが搭載されています。
Renesasの車載32bitマイコン
ルネサスエレクトロニクス製の車載32bitマイコンであるRH850ファミリでは、ご紹介したような低消費電力モードを備えています。
今回はRH850/U2Aシリーズを例に挙げましたが、その他のシリーズやお客様向けの評価ボード等もございますので是非弊社までお問合せ下さい。
また、ご紹介した低消費電力モードはRH850/U2Aのユーザーズマニュアルにより詳細な情報があります。
Webからどなたでもダウンロードできますので是非ご覧ください。
RH850/U2A -ゾーン/ドメイン マイクロコントローラシリーズ-