- 公開日:2025年09月19日
- | 更新日:2025年09月30日
今さら聞けない車載ネットワーク入門~LIN , CAN , Ethernet~
- ライター:Kentaro Hatanaka
- プロセッサー
車載ネットワークの動向
近年、自動車はますます高度な電子制御システム(ECU)を搭載しており、車両内の各種センサーやアクチュエーター、制御ユニット間で多種多様かつ膨大なデータのやり取りが必要になっています。車載ネットワークはそれらの通信を可能にし、今後も高度化する自動車制御を実現する上で必要不可欠となっています。そのため、ECU開発では車載ネットワークの活用は避けて通れません。しかし、車載ECUに搭載されている通信技術も多種多様となり、これから開発に携わるエンジニアにとって理解するハードルが高くなっています。
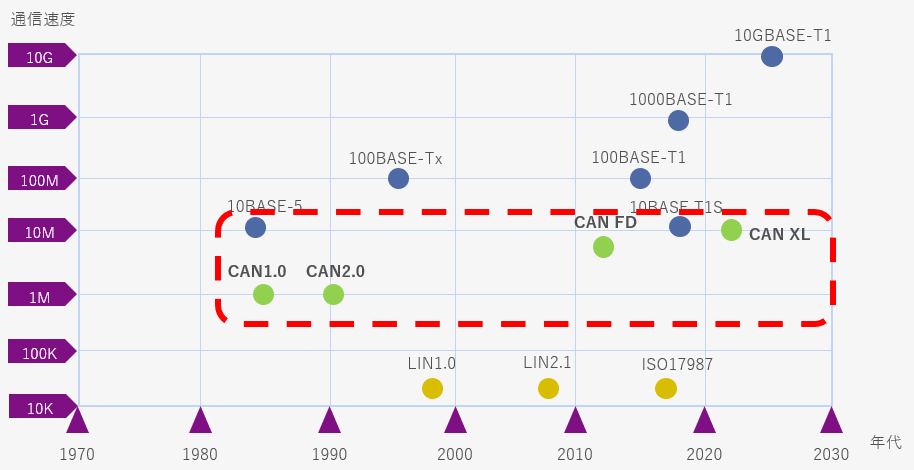
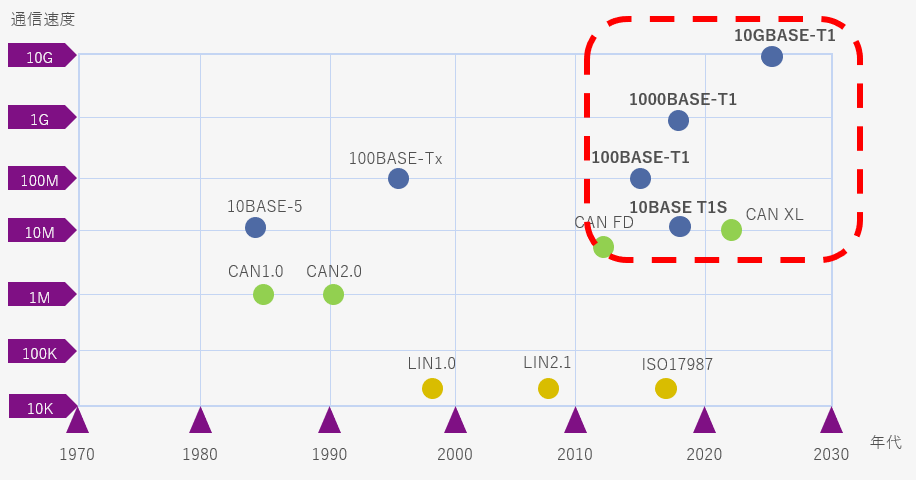
本記事では、車載ネットワークの基本的な技術であるLIN(Local Interconnect Network)、CAN(Controller Area Network)に加え、車載では新しい技術であるEthernetのそれぞれの基本的な動作、活用方法について入門者向けにわかりやすく解説します。横軸を年代、縦軸を通信速度としてグラフにした場合、3つの通信規格はそれぞれこのような分布に配置することができます。
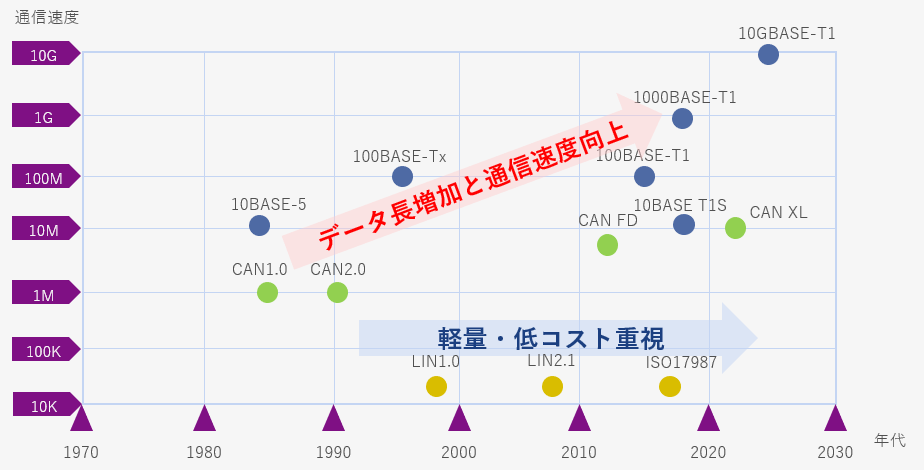
近年の車載動向とともに通信にもデータ長増加と通信速度向上が求められ、近年では車載イーサネットの規格が多く登場しております。しかし、LINの様に軽量、低コストで実現可能な通信規格も使用されています。このように車載通信では適材適所に様々な通信規格が適用されます。
車載ネットワークに求められる条件
車載ネットワーク製品に一般的に求められる条件例を示します。
車載以外の通信機器では最新・最高性能が特性になるのに対して、車載通信機器では信頼性・品質・保守性が求められます。また、製品寿命も車載製品は15年を求められることがあります。
車載製品には、性能面でのパフォーマンスも重要ですが、安定した低消費な通信が求められることが多くあります。

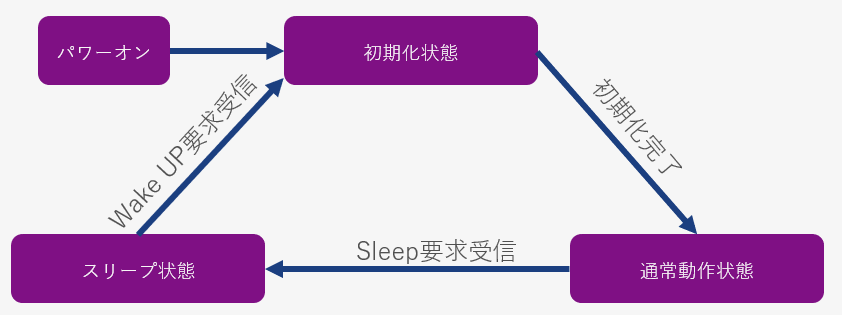
低消費電力を重要視する車載ネットワークの特徴として、スリープ機能が挙げられます。車載ネットワークでは、通常動作状態からスリープ状態に移行し、WakeUP要求を受信した際に初期化を経由して通常動作状態に移行する状態遷移を通信で実現可能にすることが求められます。
そのため、車載通信規格のほとんどが、このスリープ/ウェイクアップに対応しています。
LIN
ここからは車載ネットワークの1つであるLIN通信について説明します。
LINはLINコンソーシアムで発案された通信規格であり、欧州の自動車メーカー、半導体メーカーが主導で規格を策定しました。1999年に最初のバージョンであるLIN1.0が公開されました。現在は国際標準機構ISOの17987で規格されています。
LINは車載分野においての低コストネットワークの実現が目的で作成されました。通信速度は1kbps~20kbpsとなります。
現在、ドアスイッチ、ミラーやダッシュボードスイッチなどがターゲットで、次の章で説明するCANのサブネットワークとしての利用がメインとなります。
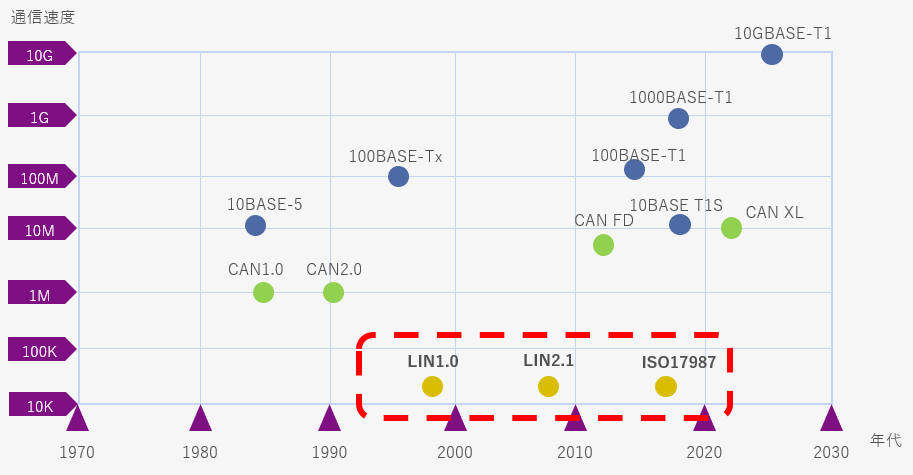
LINプロトコルの位置づけのイメージはこの様に低速な通信を実現する位置にあります。
コスト面で優れているLINは、現在も車載ネットワークの中で重要な通信規格として存在しており、最新の規格としては2015年にISOの規格として策定されており、車載のトレンドが変化している現在でも現役の通信規格です。
〇 LINの信号処理
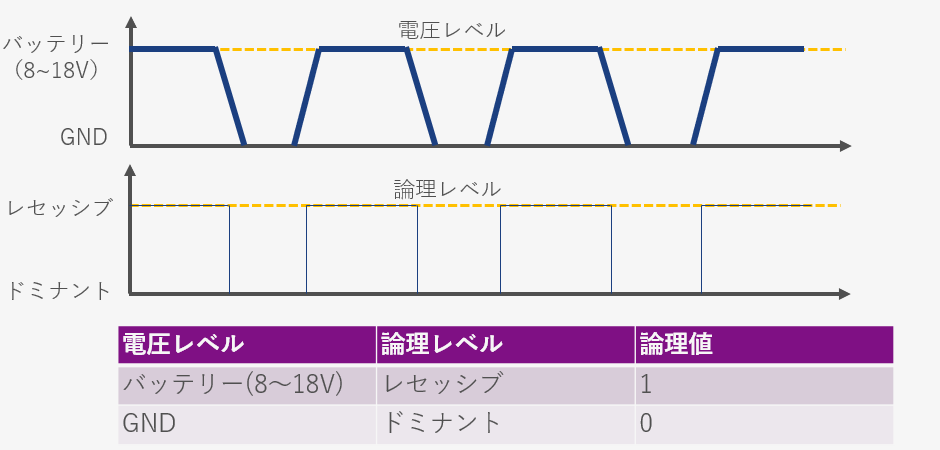
LINのバスではドミナントとレセッシブの2つの論理レベルで信号を処理します。
LINトランシーバーはISO9141という標準規格に準拠したもので、電気特性としては通常8から18Vの範囲で動作しますが、LINトランシーバーは40Vの過電圧に耐えられる仕様であることが定められています。電圧レベルと論理レベルを見てみると、電圧がバッテリーレベルになった際にレセッシブとなり論理値は1、グラウンドレベルとなった際にドミナントとなり論理値は0となります。
〇 LINのネットワーク構成
LINでは、複数のECUがバスに接続しバス型のネットワークを構成します。
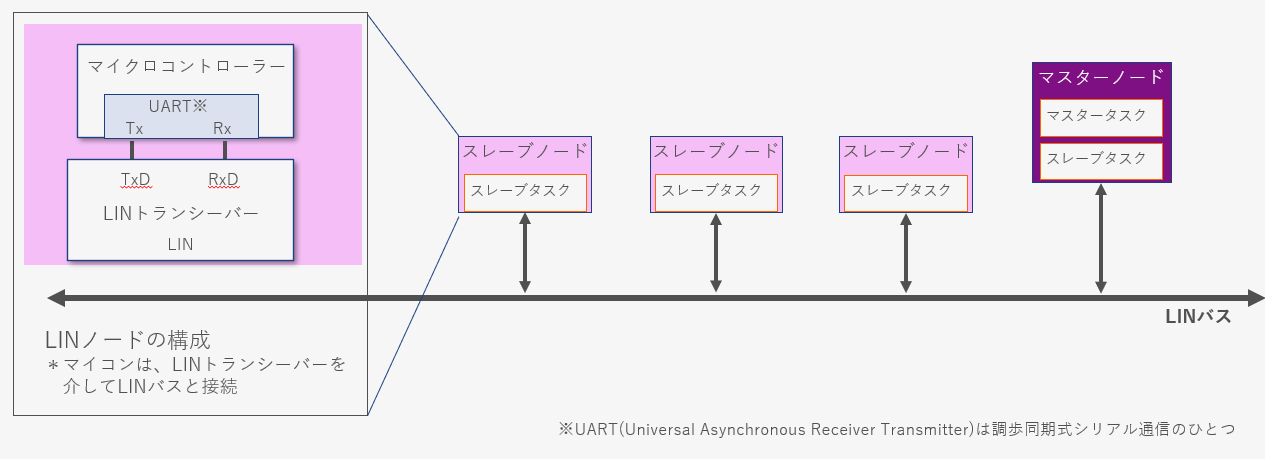
ここで、LINネットワークを構成する個々のECUのことをLINノードと言い、LINネットワークの推奨最大ノード数は一般に16ノードです。LINノードの構成を見てみると、LINノードはマイコンとLINトランシーバで構成されます。マイコンとLINトランシーバ間の通信にはUARTが使われており、LINバス上にデータを送信したり、LINバス上に流れているデータを受信したりします。
また、各LINノードにはソフトウェアでマスターノードかスレーブノードを割り当てます。この時、1つのLINバスラインに接続出来るマスターノードは1つで、それ以外はスレーブノードとなるように割り当てます。
マスターノードはLINネットワーク全体を制御し、スレーブノードはマスターノードに従って通信します。さて、マスターノードにはマスタータスクとスレーブタスク、スレーブノードにはスレーブタスクという役割があります。
〇 LINのフレーム構成
LINのフレーム構成はヘッダーとレスポンスに分かれています。
マスタータスクはヘッダーと呼ばれるID情報を持つフレーム部を送信し、スレーブタスクはLINバスに流れるヘッダーを監視しています。そして、ヘッダーとスレーブタスクが持つID情報が一致した場合、スレーブタスクはレスポンスとしてデータを送信します
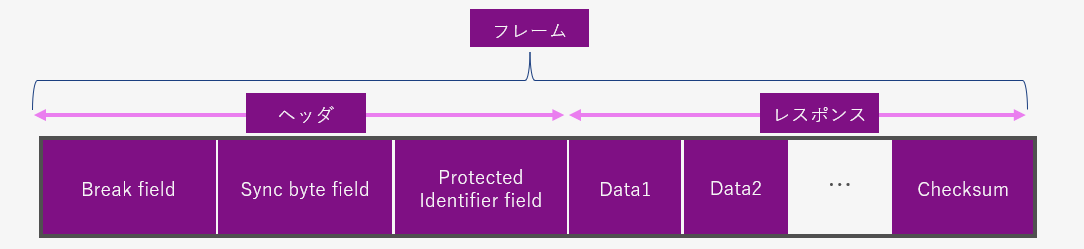
Break field :フレームの始まりを表す
Sync byte field :各ノードの周波数誤差を調整
Protected identifier field :ID、DLCとParityから構成される。スレーブのノード指定を意味するData1-Data8 :データの中身。0~8バイトの任意の長さが定義可能
Checksum :エラー検知用のチェックサム
〇 LINの活用事例
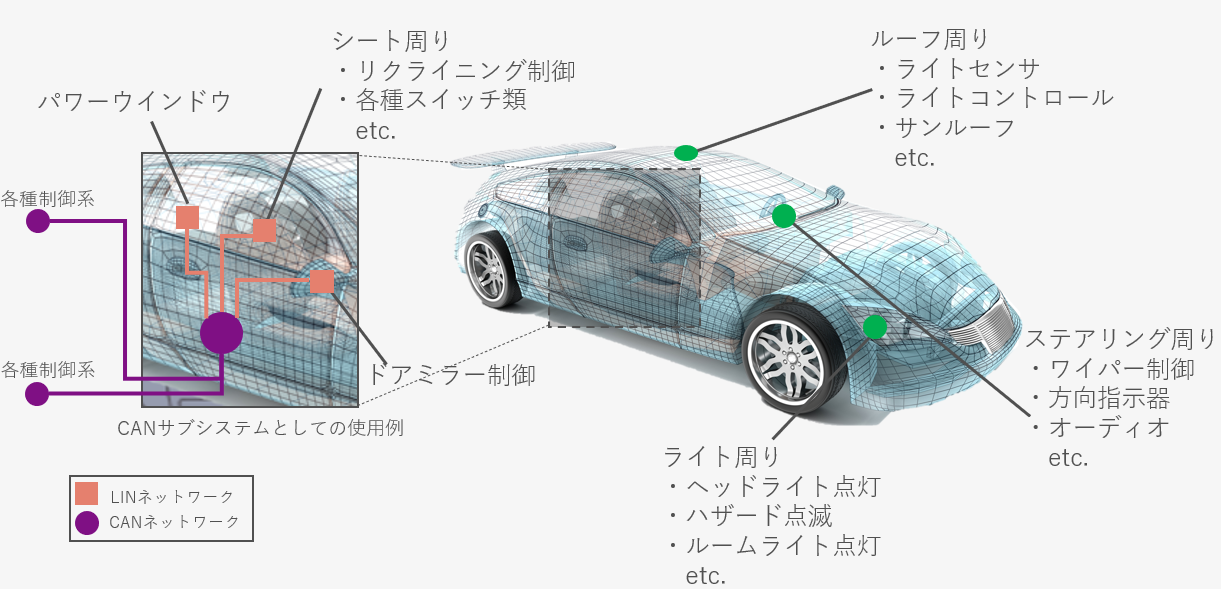
LINネットワークを利用して、効率的かつ低コストで制御可能な箇所に使用されます。
ルーフ周りであれば車室内ライト制御やサンルーフに、ステアリング周りではワイパー制御や方向指示器、ライト周りでのヘッドライト点灯などが挙げられます。また、車両内部の比較的小規模な制御系において、CANなどと組み合わせることで、車載電子制御の階層化を実現し、開発コストを分散させやすい利点がありCANのサブネットワークとしての利用があります。
主な部分としてパワーウインドウやドアミラー、シートまわりの制御などで広く利用されています
CAN/CAN FD
CANについて説明します。
CANはドイツの電装メーカーであるBOSCH社が電子制御システム向けの通信プロトコルとして発案されました。
CANの特徴はデータの信頼性、確実性にあります。現在では高速CAN、低速CANが存在し、それぞれISO11898-2,ISO11898-3として標準規格化されています。

高速CANでは125kbps~1Mbpsの通信速度、低速CANでは40k~125kbpsでの通信が可能です。現在の車載ネットワークではCANの場合、ほぼすべてが高速CANと言っても良いかもしれません。
また、CANは後段で説明するCAN FDに対し、クラシックCANと呼ばれることもあります。CANの使用シーンとしては社内の制御系以外にも診断機との通信としても使用され、皆さんがお持ちの車の車検の際にも活用されているはずです。
現在は、CAN通信の信頼性が評価され、車載業界以外でも使用事例が増えています。
上図はCANプロトコルの位置づけのイメージです。
CANは信頼性の高いデータ通信が可能であり、車載ネットワークの中でも特に信頼性が要求されるステアリング制御やエンジン、モーター制御で活用されております。最初のCAN規格であるCAN1.0はISO-11898で定義されておりましたが、CAN2.0に移り変わり、現在はほとんど使用されておりません。CAN1.0と2.0の大きな違いは拡張フォーマットに対応しているかどうかとなりますが、拡張フォーマットについては後ほど説明します。
最近ではECU間でやり取りするデータ量の増加からCANFDの採用が増加しております。また、より大量のデータのやり取りのためEthernetと親和性の高いCAN XLという規格も考案されています。
〇 CANの信号処理
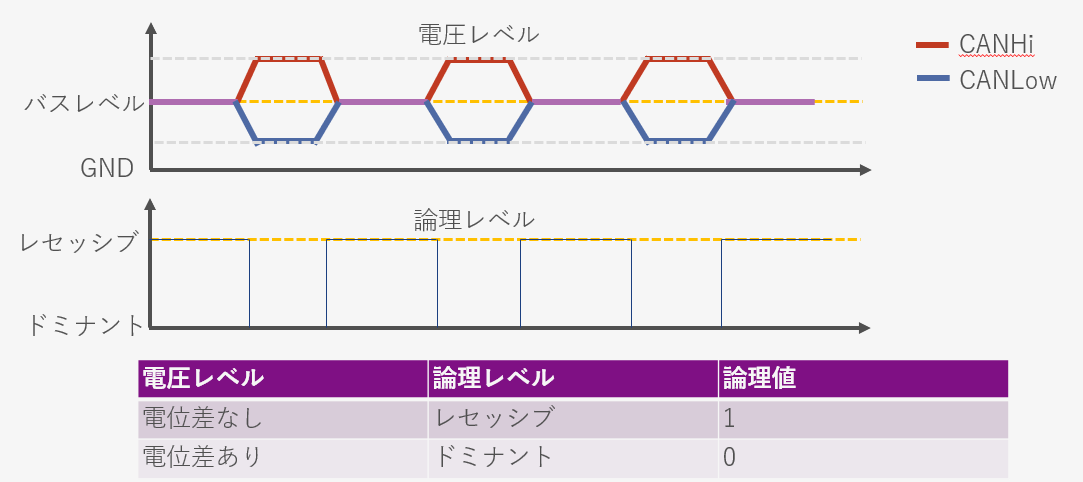
CANバスでもドミナントとレセッシブの2つの論理レベルを使用して信号処理をおこないます。
CAN通信における信号処理の特徴は差動信号処理にあります。これはノイズ耐性と信号の信頼性を高めるために非常に重要な技術です。CAN通信では、CAN_H(High)とCAN_L(Low)という2本の信号線の電位差を使って差動信号処理を行います。
例えば、バスレベルが2.5Vだった場合、CAN_H = 2.5V、CAN_L = 2.5V のばあい 差分 は 0Vで差分なしとなり論理的にレセッシブとなります。CAN_H = 3.5V、CAN_L = 1.5V で 差分 が 2Vの場合は論理的にドミナントとなります。
CANバス上ではレセッシブは“劣性、ドミナントは“優性とされ、CAN通信はこの関係を使って様々な仕組みを実現しています。
〇 CANのネットワーク構成
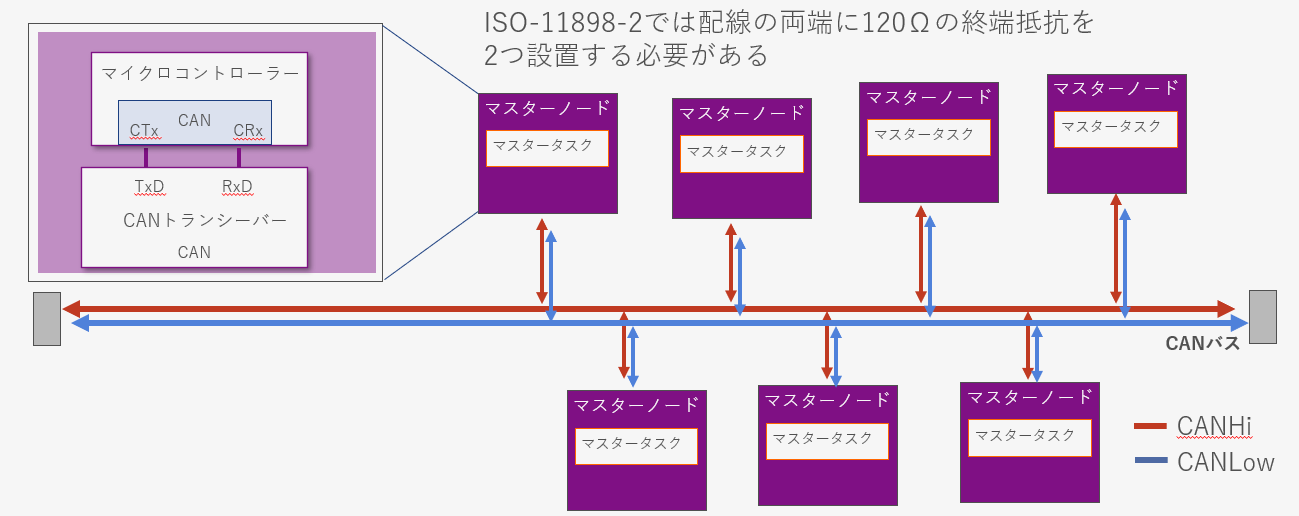
CANでは、複数のECUがバスに接続しバス型のネットワークを構成します。ここで、CANネットワークを構成する推奨最大ノード数は一般に30ノードとされています。ISO-11898-2では配線の両端に120Ωの終端抵抗を2つ設置する必要があります。
CAN通信を使用した開発で通信がうまくいかない場合、まずは終端抵抗がつながっているかを確認する様にしましょう。
CANノードの構成を見てみると、CANノードはマイコンとCANトランシーバーで構成され、CANトランシーバーがCANHi,CANLowに接続します。CANのノードはすべてマスターノードとなり、マルチマスター方式と呼ばれます。
各マスターノードはIDを持ち、それぞれのタイミングでデータの送信を試みます。
〇 CANフレーム構成
CANのフレーム構成です。
データフレームの開始を表すSOFから、アービトレーションフィールド、コントロールフィールド、データフィールドと続き、通信の信頼性のために重要なCRCフィールド、アックフィールド、最後にEOFでデータフレームの終了を表します。
CANには標準フォーマットと拡張フォーマットが存在します。拡張フォーマットはCAN2.0以降のCANの規格で使用可能です。
拡張フォーマットで拡張されるものはIDで、具体的には11ビットから29ビットに拡張されます。これは使用可能なIDの数が2028通りから約5億通りとなり、かなり膨大なメッセージの種類を送受信可能にします。拡張フォーマットは主にバス、トラックなどの大型車両で使用されています。
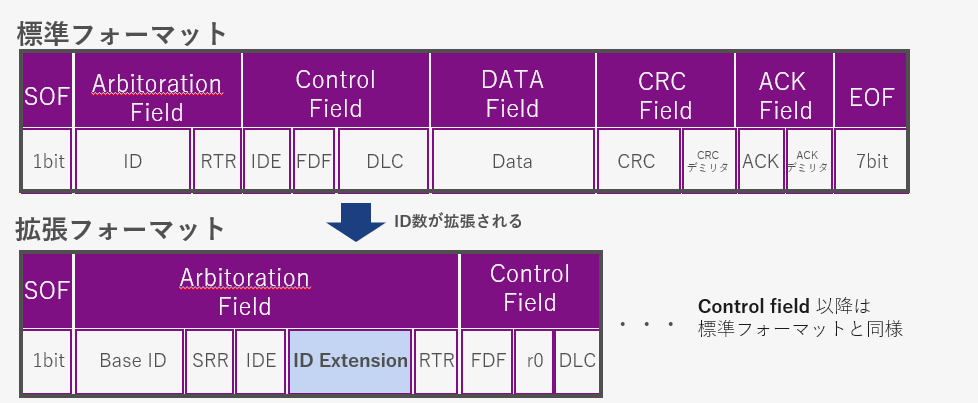
SOF(Start of Frame):データフレームの開始を表す領域
Arbitoration Field:フレームの優先順位を判断する領域
Control field:IDE、FDF、DLCでフレームの構成を判断する領域
DATA Field:データを格納する領域
CRC Field:フレームの転送誤りを判断する領域
ACK Field:送信したデータフレームを正常に受信できたかの確認に使用
EOF(End of Frame):データフレームの終了を表す領域
〇 CAN FDの概要
続いてCAN FDについて説明します。
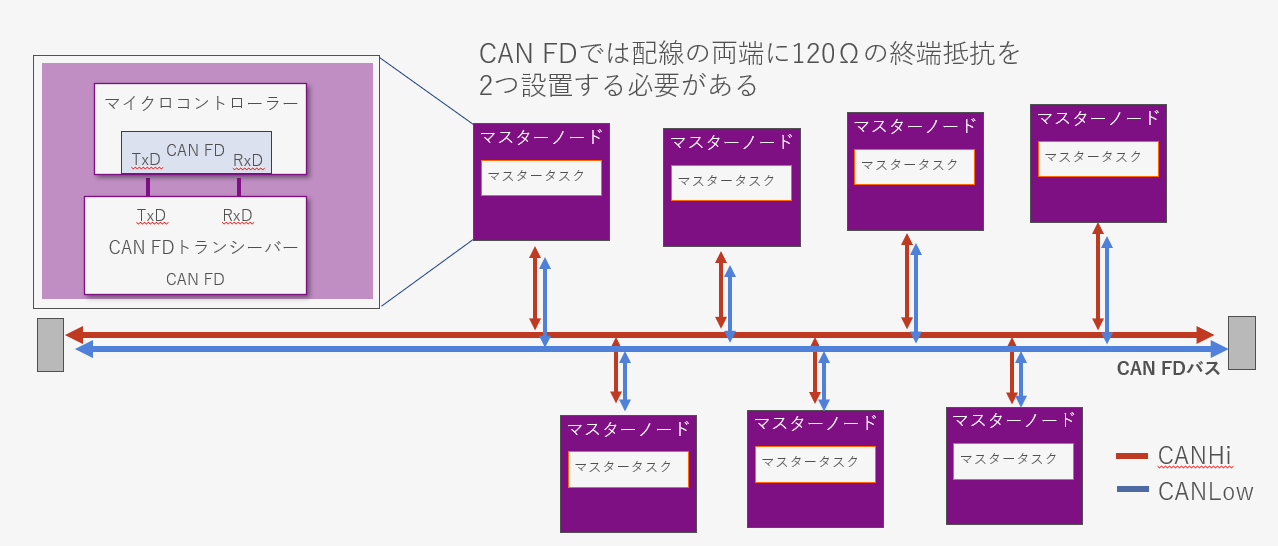
CAN FDはCANの高速化を目的に策定された通信規格であり、従来のCANと物理層、システム構成がほぼ同じですが、コントローラー、トランシーバーはCAN FD対応が必要となります。
CAN FDはフレームのデータ部分の転送速度が可変であり、1Mbps以上の速度で通信が可能です。
CAN FDはISO1198-2で標準化されています。データ長は8byteから64byteに拡大されています。
〇 CAN FDのネットワーク
CAN FDのネットワーク構成はCANと大きく変わりません。
ただし、コントローラー、トランシーバーがCAN FDに対応している必要があります。
〇 CANとCAN FDの注意点
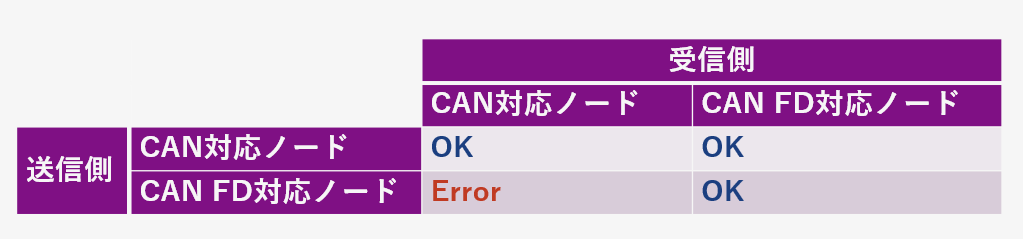
CAN FDとCANが同一バス上に接続された場合の振る舞いですが、そもそも同一バス上に接続することは可能です。しかしCAN FDはどちらのフレームも受信可能ですが、CANノードはCAN FDフレームを受信できない点にご注意ください。
CAN FDで送信されたデータはCANで受信時にエラーとなってしまいます。システム全体または一部をアップデートされる際には、CAN FD対応のトランシーバーなのか等の確認が必要となります。
〇 CAN FDのフレーム構成
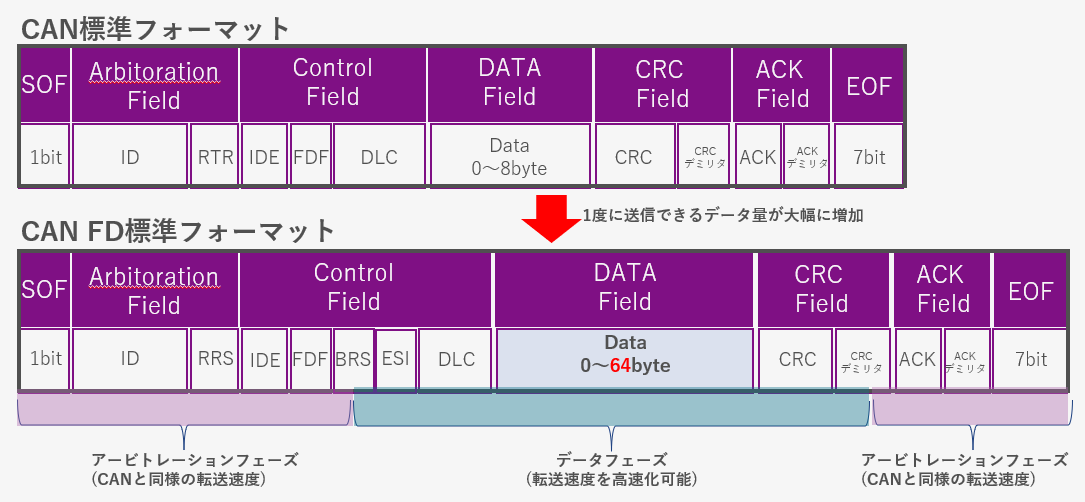
こちらではCANとCAN FDのフレーム構成の比較を紹介します。
フィールドは変わらずコントロールフィールドのビット内容が変化しています。1番大きな変化点はデータフィールドがCANが0~8バイトだったのに対し、CAN FDでは0~64byteに拡大されています。
また、CAN FDのフレームではアービトレーションフェーズとデータフェーズに分割されアービトレーションフェーズではCANと同様の転送速度で、データフェーズでは高速化された転送速度で通信を行うことで高速化を実現しています。
〇 CAN,CAN FD活用事例
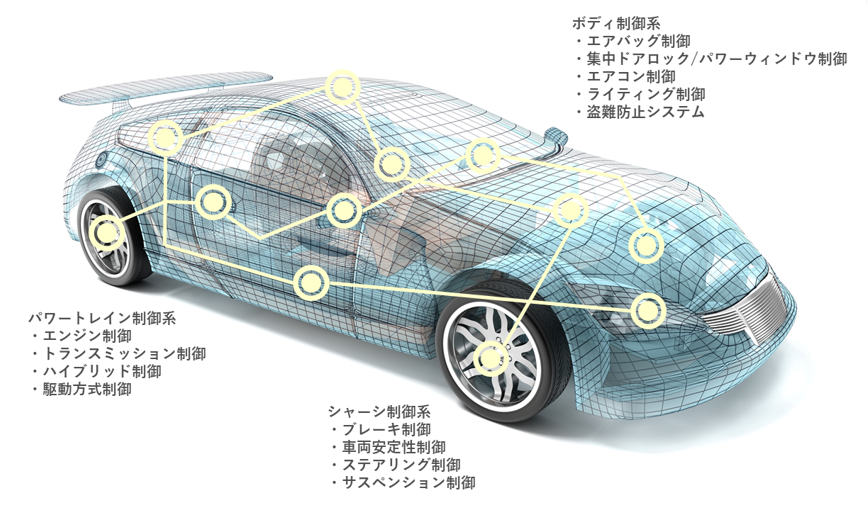
CAN,CAN FDの活用事例について説明します。
CANは車両内の様々なECU間で情報をやり取りするために活用されていますが、主な制御系では、パワートレイン制御系としてエンジン制御、トランスミッション制御やハイブリッド制御、ボディ制御系ではエアバッグ制御、エアコン制御やライティング制御のリンとのゲートウェイECUとして、シャーシ系ではブレーキ、ステアリングやサスペンションと、車の走る、曲がる、止まるに関連する重要なECU間の通信に活用されています。
Ethernet
車載ネットワークの紹介の最後はEthernetです。
まず、車載Ethernetの導入背景についてです。Ethernetは皆さんにも身近な通信インターフェースなのではないかと思います。車載では、もともと故障診用の通信インターフェースとして使用されていました。
昨今、“様々なものとつながるConnected、自動運転化のAutonomous、Shared & Services、電動化のElectric”からなる「CASE」へ向けたECUの高機能化に伴い、車載Ethernetの採用が加速しました。
主な目的として、
- センサの高解像化、セキュリティ対策としての通信データ量の増大
- 車載アーキテクチャの動向による集中処理への変化
- 製品出荷後にアップデートを行う、静的なシステムから動的なシステムの増加
の3点があげられます。
車載ネットワークの中でのEthernetの位置づけについてです。
Ethernetという通信インターフェース自体は昔から存在しており、外部診断機との通信では車載以外でも使用されている100Base-Txが使用されたりしています。しかし、先ほどお話した通り、車載にて大量のデータ通信を高速で実施するシステムに対する要求により、車載向けのEthernet規格が策定されました。赤枠内が車載イーサネットと呼ばれる規格となります。
年代は比較的最近標準化されたものが多く、通信速度10gbit/sの通信が可能な10Base-T1から、CANとの親和性の高い通信速度10MB/sの10Base T1Sまで、車載Ethernetでカバーできるレンジは広がっているイメージとなります。
〇 車載Ethernetのネットワーク構成
Ethernetのネットワーク構成についてです。
車載イーサネットのトポロジーは、スイッチを介して分岐することで柔軟な構成が実現可能となります。こちらの図の中での分岐している部分はスイッチとして機能しています。
HWの構成について説明します。
EthernetのトランシーバーはPHYと呼ばれることが多くマイコン側にEMACとよばれるコントローラーがあり、PHYとEMACをMDIOとMIIが接続されています。MDIOはEMACからPHYの制御、MIIはデータの送受信用のインターフェースとなります。
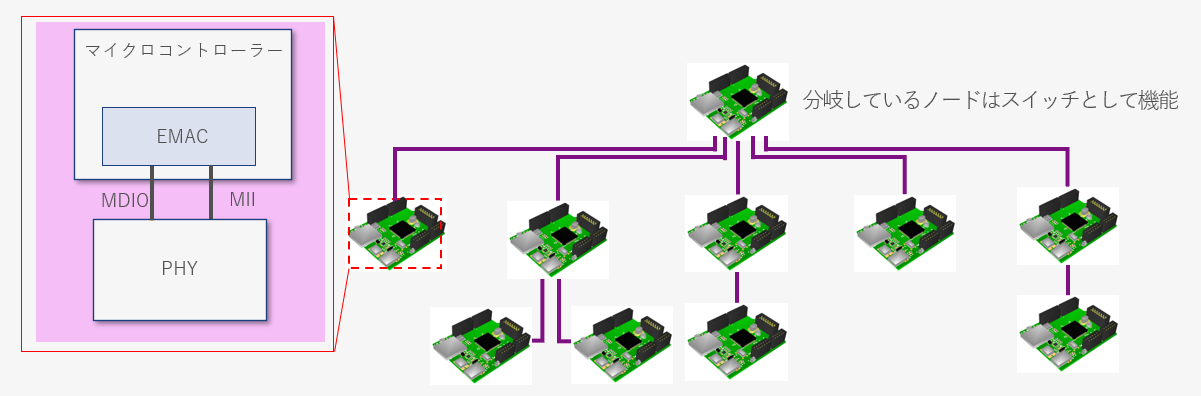
EMAC(Ethernet Media Access Control):イーサネット媒介アクセス制御用インターフェース
MII(Media-independent Interface):データ送受信用インターフェース
MDIO(Management Data Input/Output): PHY制御用インターフェース
PHY (Physical Layer):Ethernetトランシーバー
〇 OSI参照モデルの中での車載Ethernet規格の位置づけ
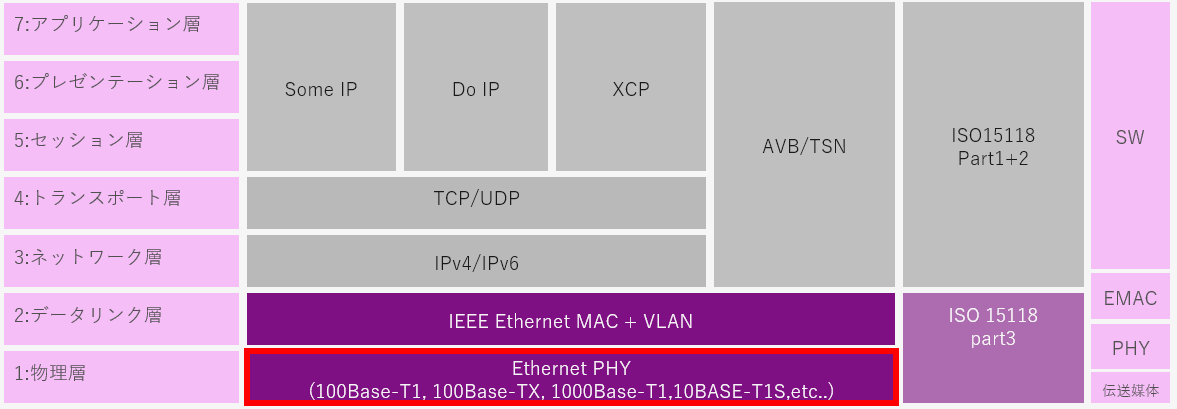
ネットワーク通信を階層的に分けて理解、設計するための枠組みとしてOSI参照もでるが存在します。
OSI参照モデルは7階層に分かれていますが、規格上イーサネットとして定義する場所はおもにデータリンク層、物理層で規定されている部分となります。これまで紹介してきた100BASE-T1や10BASE-T1SなどのEthernet規格は物理層であるEthernet PHYの違いで分類されます。
〇 車載向けEthernetの活用事例
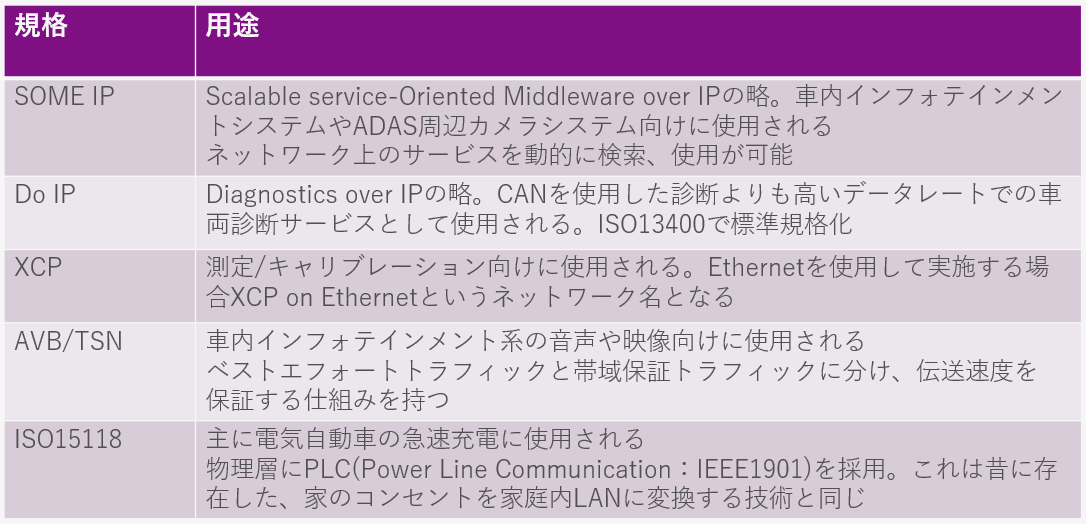
OSI参照モデルに当てはめて考えた際に、車載イーサネットは主に5つのアプリケーション規格の用途で使用されます。
用途に合わせて物理層を組み合わせることにより最適なネットワークを構築します。
車載イーサネットの5つのアプリケーション規格の主な活用事例を簡単にまとめています。
車載ネットワークを実現する製品はこちら
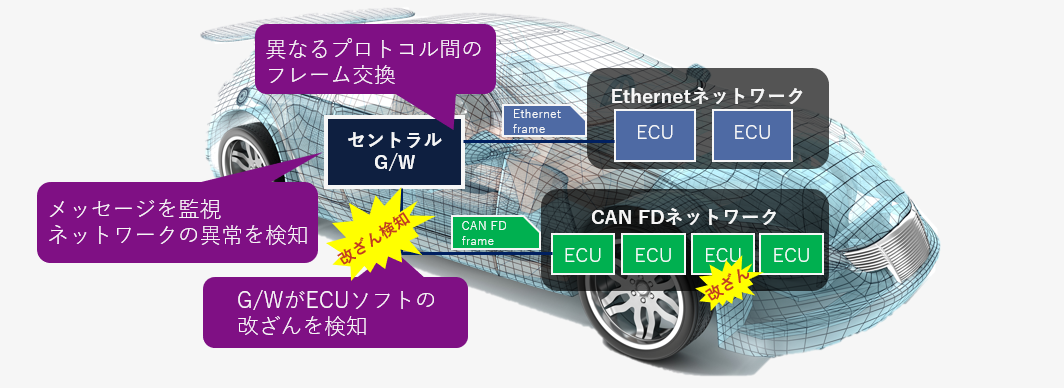
ここまで紹介してきた複数の車載ネットワークが活用されるシステムとしてコミュニケーションゲートウェイがあります。コミュニケーションゲートウェイとは、異なるプロトコルを持つネットワーク同士を接続するための装置や機能のことです。車載アーキテクチャの中でコミュニケーションゲートウェイ機能を担うシステムはセントラルゲートウェイと表現されます。
例えば、CAN FDのネットワークからEthernetのネットワークへプロトコルの変換を行いデータ通信を実現します。また、ネットワーク上での以上を検知したり、G/WがECUの改ざんを検知する役割を求められることもあります。
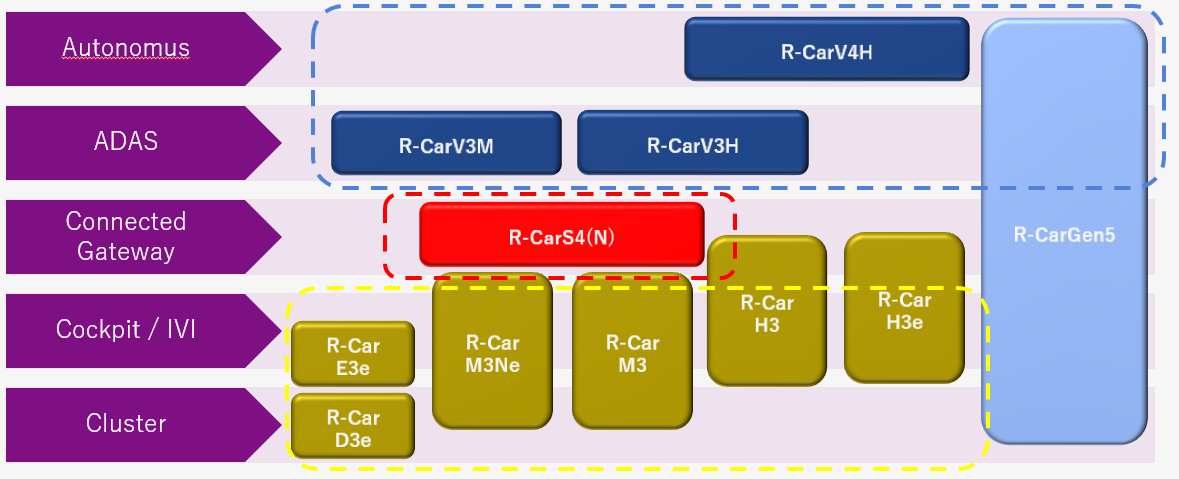
セントラルゲートウェイを実現可能なデバイスとしてルネサスエレクトロニクス社のR-Carファミリの一つである、R-CarS4をおすすめします。ルネサスエレクトロニクスでは車載向けSoCとしてR-Carファミリをラインナップしております。車載アプリケーションごとにクラスター、IVI向けのR-CarD3からR-CarH3、ADAS、自動運転向けのR-CarVシリーズ、そしてGateway向けのR-CarS4が存在します。今後車載アーキテクチャの流れとともにR-Carのジェネレーション5が拡充されていく予定です。その中でもR-CarS4はハイパフォーマンス、高いセキュリティ機能を保持しながら、低消費電力でゲートウェイ機能を実現可能にするコンセプトのデバイスです。
R-CarS4は車載ゲートウェイECUに求められる機能安全に対応しており、ASILをサポートしております。セキュリティ面ではハードウェアセキュリティモジュールを搭載し、データの暗複合を効率的に実施可能です。そしてゲートウェイとしての機能に欠かせないCAN FDやギガビットまで対応したEthernetの制御が可能です。
お問い合わせはこちら
ルネサスエレクトロニクス製SoCのR-CarS4に興味がある方はこちらのリンクからご覧ください!↓
R-Car-S4 – カーサーバー/コミュニケーションゲートウェイ用SoC (システムオンチップ) | Renesas ルネサス
また、ルネサスエレクトロニクスではR-CarS4を搭載した評価ボードの用意もあります。
RTP8A779F0ASKB0SP2S – R-Car S4 開発ボード / Spider | Renesas ルネサス