- 公開日:2026年01月28日
- | 更新日:2026年03月03日
Kakipにラズパイで使えるPiCameraをつないでみる【前編】
はじめに:Kakip×PiCameraで何ができるか
KakipはRZ/V系MPUを搭載した小型SBCで、DRP‑AIアクセラレータとMIPI CSI‑2入力を備え、エッジAI用途に強みがあります。本シリーズではPiCamera v2(IMX219)をKakipに接続し、カメラ入力の取得とAIアプリ実行までを段階的に解説します。下記記事も参考にしてください。
必要なもの(ハード・ソフト)
本来はネイティブ Linux マシンの用意が望ましいですが、環境準備が難しいケースも多いため、今回はWindows パソコン(Windows 11)だけでトライしました。以降は WSL2 上の Ubuntu に Docker Engine を直接インストールして使います(Docker Desktop は使用しません)。
ハードウェア
- Kakip(RZ/V2Hベース)本体
- PiCamera v2(IMX219)+FFCケーブル
- 電源:12V(推奨仕様を満たすもの)
- microSDカード:16GB以上(OS/イメージ展開用)
- キーボード/マウス/ディスプレイ、LAN など(必要に応じて)
ソフトウェア
- Windows 11(管理者権限が使用可能であること)
- WSL2(Ubuntu 22.04 もしくは 24.04 推奨)
- Docker Engine(WSL 内に直接インストール)
- RZ/V2H AI SDK v5.20(固定)
- Renesas 公式配布の v5.20 パッケージおよびドキュメント(Getting Started / Release Note)
- (任意)microSD書き込みツール(balenaEtcher など、ホスト側でイメージを書き込む場合)
ネットワーク・権限の前提
企業ネットワーク/プロキシ配下の場合、WSL(Ubuntu)側での proxy 設定やリポジトリアクセスが必要になります。
Windows 側での 管理者権限(WSL の有効化等)、Ubuntu 側での sudo 権限が前提です。
Windows 11 に Linux を導入する
Microsoft Store 経由で Ubuntu を導入すること推奨します。Microsoft Store の検索バーで 「Ubuntu 22.04 LTS」(または 「Ubuntu 24.04 LTS」)を検索 → [入手]→[インストール]可能だと思います。
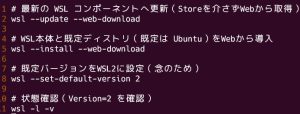
ただ今回使用したパソコンでは Microsoft Store 経由でのインストールができなかったため、Power Shell を使って WSL2 を導入しました。色々試しましたが、–web-download オプションを使って Microsoft Store を使わずに最新の WSL パッケージを直接取得してインストールすることができました。
WSL2は一般的なLinuxのディストリビューターと比較してプリインストールされているアプリケーションが少ないように思います。必要に応じて手動でインストールしましょう。
WSL(Ubuntu)上に Docker Engine を直接インストールする
WSL 上の Ubuntu に Docker Engine を導入します。詳細手順は脚注の公式ドキュメントをご参照ください(本記事では Docker Desktop は使用しません)。
RZ/V2H AI SDK v5.20 の取得と開発環境構築
Kakip のマニュアルには以下の記載があります。今回は v5.20でコンテナを準備します。
Renesas AI SDK v5.00を基盤とし、Kakipのハードウェア構成に応じて、U-Boot等のファームウェアに修正を施している。詳細はGitHubを参照ください。
SDK(v5.20)の入手
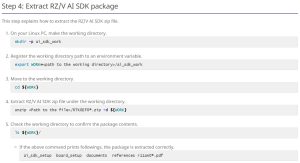
Renesas 公式の Renesas RZ/V AI | The best solution for starting your AI applications. を参照し AI SDK V5.20 の zip ファイルをダウンロードします。ダウンロードした zip ファイルは WSL/Ubuntu 環境下で Step4 に従い解凍します。
カーネル・ビルド用の環境を構築する
解凍したSDKの ai_sdk_setup フォルダで Docker を使用してカーネル・ビルド用の環境を構築します。これは上記as RZ/V AI | The best solution for starting your AI applications. の Step5 に従い進めます。

こちら”For RZ/V2H, RZ/V2N”に記載のコマンドを使用します。私の環境では30分かかりました。
もしシェルを bash 以外に切り替えていましたら bash に戻してください。私は好みで tcsh をよく使用しますが、Docker のコマンドが bash を使用している前提で記載されているのでエラーになります。
ルネサス公式ページ記載の環境構築は以上となります。ここからは Kakip のマニュアルに従い IMX219 カメラを接続するための環境を構築します。
IMX219を接続するためのビルド
ここからは以下のサイトを参考に構築を進めます。
kakip_docs/IMX219_Guide/IMX219_Guide.md at main · YDS-Kakip-Team/kakip_docs · GitHub
この時点で「RZ/V2H用AI SDKのコンテナイメージを作成」は完了しています。以下の 1.事前準備を実行します。

以上でカーネル・ビルド用の環境を無事構築することができました。
後編ではイメージファイルを作成し、SDカードからKakipを起動して PiCamera を動かします。
脚注(参照リンク)
- 公式:Ubuntu への Docker Engine インストール(APT リポジトリ設定・導入・削除まで)
Install Docker Engine on Ubuntu | Docker Docs - 公式:インストール後の推奨設定(非 root 実行・自動起動など)
Linux post‑installation steps | Docker Docs - 公式:Docker Engine の全体ドキュメント(構成・ネットワーク・保守)
Docker Engine | Docker Docs - 参考:Docker Desktop なしで WSL2 へ導入する考え方と手順(解説記事)
Get Started with Docker on Windows (WSL2) without Docker Desktop
Install Docker in WSL 2 without Docker Desktop — Nick Janetakis