- 公開日:2026年03月10日
- | 更新日:2026年03月17日
車載組込みソフトウェア開発入門
- ライター:菅原未有
- マイコン
本記事では、『車載組込みソフトウェア開発入門』と題し、ルネサスの車載マイコンやマイコンプログラミングの基礎を理解しながら、車載組込みソフトウェア開発の流れの基本をご説明します。
初めて車載マイコンを扱う方、初めて車載組み込みソフトウェアに触れる方は、ぜひご覧ください。
1.車載マイコンの基礎
初めに、ルネサス製車載マイコンの基礎についてご紹介いたします。
自動車業界のメガトレンド
まず、自動車業界で今どんな変化が起きているのかを押さえておきましょう。
キーワードは『CASE(ケース)+E』です。
CはConnected、AはAutomated、SはSharing、EはElectric、そして最後のEはE/Eアーキテクチャを意味します。
ConnectedではクラウドやOTA更新で車とサービスがつながり、AutomatedではADASから自動運転へ進化しています。
Sharingはカーシェアなどの新しい移動サービス、ElectricはEVやPHEVの普及です。
そして特に重要なのがE/Eアーキテクチャです。
ECU統合やゾーンアーキテクチャ化により、マイコン機能、特に、セキュリティ、高速通信、機能安全などの強化が求められるようになっています。
この変化により、車載システムはハード中心からソフトウェア中心へと変化し、マイコンの役割がますます大きくなっています。
Renesasソリューションのご紹介
では、E/Eアーキテクチャの進化により重要化するマイコンに対して、Renesasにはどんなソリューションがあるのか見ていきましょう。
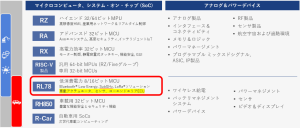
Renesasは、車載や産業を含む幅広い分野に向けて、マイコンからSoC、アナログ製品まで多彩なソリューションを提供しています。表にあるように、ハイエンドのRZやRA、RXシリーズは高性能な32ビットや64ビットMCUで、車載だけでなく産業機器やIoTにも対応しています。
そして本日の主役は、RL78シリーズです。
RL78は低消費電力の8/16ビットMCUで、構造がシンプルなため初心者にも扱いやすく、車載のアクチュエータやセンサ、ボディ系ECUなどで広く使われています。
さらに、産業向けにも豊富なラインナップがあり、幅広い用途に対応できるのが特徴です。
もちろん、車載の中でも高度な制御や自動運転に関わる領域では、RH850シリーズやR-Car SoCが活躍していますが、
組込み開発の基礎を学ぶなら、まずはRL78が最適です。
この後は、車載制御の進化を支えるRL78の特徴を詳しく見ていきましょう。
車載制御の進化を支えるRL78シリーズ
★将来のE/Eアーキテクチャに対応するため、アクチュエータ用MCUの新たな要求に応える
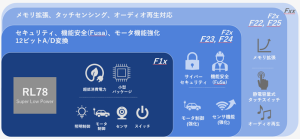
ここでは、車載制御の進化を支えるRL78シリーズについてご紹介します。
E/Eアーキテクチャの高度化により、車載ネットワークではセキュリティ、CAN-FD、高速通信、機能安全(ASIL-B)といった新しい要求が増えています。
こうした要求に応えるため、RL78シリーズは進化を続けています。
従来からの低消費電力や高温対応といった強みを維持しながら、新しいF23、F24、F22、F25シリーズでは、これらの新機能をサポートしています。
さらに、性能向上やBLDCモータ制御、タッチセンサ対応、ROM拡張といった機能にも適応します。
また、既存ソフトウェアやピン配置を活かせるため、資産を有効に利用できるのも大きなメリットです。
このように、RL78は車載アクチュエータやセンサ制御に最適なMCUとして、今後も重要な役割を担っていきます。
車載向け機能とユースケース
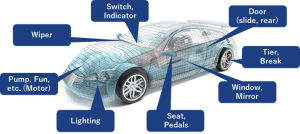
ここでは、RL78シリーズが車載向けにどのような機能を提供しているかを見ていきます。
RL78はもともと低消費電力と小型パッケージを強みとして、照明制御やモータ制御、センサ、スイッチといった基本機能を支えてきました。
新しいシリーズでは、さらにセキュリティや機能安全(FuSa)、モータ制御の強化、12ビットA/D変換といった高度な機能に対応しています。
また、F22やF25ではメモリ拡張、静電容量式タッチスイッチ、オーディオ再生といった機能も追加され、より幅広いユースケースに対応できるようになっています。
このように、RL78は従来の強みを維持しながら、車載システムの進化に合わせて機能を拡張し続けています。
低消費電力、インテリジェント、幅広い要求への対応
最後に、RL78シリーズがどんな特徴を持っているかを簡単にまとめます。
まず、低消費電力は大きな強みで、動作時はもちろん、SNOOZEモードなどの低消費電力機能で省エネを実現します。
さらに、広い拡張性を持ち、ピン数、メモリサイズも幅広く対応可能です。
安全機能や高性能も備えており、車載に求められる信頼性を確保しています。
また、開発環境が充実していて、統合開発ツールや評価ボードを使って、すぐに試せるのもポイントです。
このように、RL78は低消費電力と柔軟性を両立し、幅広い車載ニーズに応えられるMCUです。
ここまでで、車載マイコンの基礎とRL78の特徴を押さえました。
次のパートでは、いよいよマイコンプログラミング入門に入っていきます。
2.マイコンのプログラム開発入門
いよいよプログラム開発入門です。
まずは、どんな工程で開発が進むのか、そしてどんなツールを使うのかを押さえましょう。
プログラミングの役割
まず、プログラミングの役割を押さえておきましょう。
“Program”という言葉には『計画』や『予定』という意味があります。つまり、プログラミングとは「マイコンがこれからやることを計画する作業です。その計画を形にしたものがソフトウェアです。
イメージとしては、人に『あれやって、これやって』と順番に指示するのと同じで、マイコンにも命令を順番に書いてあげます。
この命令を書くために使うのがプログラミング言語で、マイコン開発ではC言語がよく使われます。
マイコンは、このソフトウェアに書かれた命令を言われた通りに実行する、これがプログラミングの基本的な役割です。
マイコンの開発工程
まず、マイコンの開発がどんな流れで進むのかを簡単に押さえておきましょう。

開発は開始から大きく5つのステップに分かれます。
設計 → プログラミング → コンパイル → 書き込み → テストです。
設計では、処理の流れを整理するためにフローチャートをよく使います。
次に、プログラミングで人間が理解できるプログラミング言語で命令を書きます。
しかし、マイコンはそのままでは理解できないので、コンパイルで機械語に翻訳します。
翻訳された命令は、書き込みによってマイコンのメモリに保存されます。
最後に、テストでプログラムを実行し、正しく動くか確認し、問題なければ完成です。
この流れを理解しておくと、これからのツール紹介や実習がスムーズになります。
統合開発環境
これらの開発工程で登場するのが統合開発環境です。
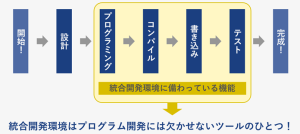
統合開発環境は、プログラム開発に必要な作業をまとめてサポートしてくれる便利なツールです。
プログラムを書くエディタ、コンパイル機能、マイコンへの書き込み、そして動作確認まで、必要な機能が一つに集約されています。
このツールを使うことで、複雑な作業を効率よく進められ、初心者でもスムーズに開発できます。
次は、実際にどんな統合開発環境を使うのかを見ていきましょう。
プログラムを開発するための環境構築
マイコンを動かすには、統合開発環境だけでなく、あと2つのツールが必要です。
ここでは、その3つのツールを押さえておきましょう。
1つ目は、先ほどご説明した統合開発環境がインストールされたPCです。RenesasではCS+やe² studioが代表的です。今回は「CS+」をご紹介します。
2つ目は、エミュレータです。これは、PCとターゲットボードをつなぎ、プログラムを書き込んだり、動作を制御するためのツールです。
3つ目は、ターゲットボードです。実際にプログラムを動かすマイコンが載った基板で、ここにソフトウェアを書き込んで動作確認を行います。
この3つが揃うことで、開発環境が完成します。
次は、Renesasの統合開発環境「CS+」について詳しく見ていきましょう。
CS+の特長
ここでは、Renesasの統合開発環境「CS+」の特長をご紹介します。
CS+は、『簡単』『快適』『安心』をコンセプトにした開発環境です。
まず、開発環境の準備が簡単です。
マイコン開発に必要な基本ツールが、1回のインストールでそろうので、すぐに使い始められます。
次に、システム開発をサポートする便利な機能があります。コード生成機能です。
設定方法が分からなくても、チェックボックスや数値入力だけで、周辺機能を制御するプログラムを自動で作ってくれます。
初心者でも、複雑なコードを書かずに開発を始められるのが魅力です。
3.車載マイコンの主な周辺機能
最後に、これから組み込みソフト開発の実践に移るうえで必要となる、車載マイコン(RL78/14)の主な周辺機能をご紹介します。
マイコン機能を動作させる流れ
まず、マイコンがどのように機能を動かしているのか、その流れを押さえましょう。
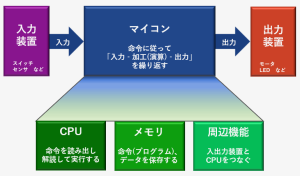
マイコンは、スイッチやセンサなどの入力装置からデータを受け取り、プログラムに従って処理を行い、その結果をモータやLEDなどの出力装置に伝えます。内部では、まず開発したプログラムがメモリに格納され、それをCPUが実行します。
このとき、CPUは内部のレジスタを制御しながら命令を処理し、必要に応じて周辺機能を動作させ信号が出力されます。
ここでいう周辺機能とは、マイコンに内蔵された様々な装置のことです。
基本的には、マイコンと外部をつなぐための入出力機能として使われます。
■RL78/F14における周辺機能例
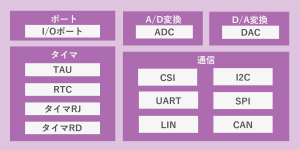
例えば、ポート、タイマー、A/D変換、通信機能が代表的です。
これらの仕組みを理解しておくと、マイコンの具体的な機能やプログラムの動きがイメージしやすくなります。
RL78の主な周辺機能
最後に、先ほど出てきた周辺機能について、RL78の主な周辺機能がどのような機能なのかご説明します。
まず、ポート機能です。これは、マイコンが外部機器と情報をやり取りするための入り口で、スイッチやセンサからの入力、LEDやモータへの出力に使われます。
例えば、入力ポートでスイッチのON/OFFを検出し、出力ポートで電流の流れを制御する場合、スイッチが押されると入力ポートが信号を受け取り、プログラムが処理を行い、出力ポートを通じてLEDを点灯または消灯します。
次に、タイマー機能。一定周期で処理を実行するための時間管理機能で、LEDの点滅やモータ制御などに欠かせません。
例えば、タイマーが時間管理を担いCPUが必要なときだけ処理することで、 “1sごとにLEDをON/OFF切り替える”というようにLEDを点滅させることができます。
さらに、通信機能があります。マイコンと外部機器間でデータをやり取りする機能です。車載分野で使用されるCAN、センサや外部メモリとの接続によく用いられるI2CやSPIなど、複数プロトコルに対応しています。
最後に、A/D変換・D/A変換です。温度センサなどのアナログ信号をデジタルに変換したり、逆にデジタル信号をアナログに変換して音声出力などに使います。
このように、周辺機能を組み合わせることで、マイコンは多様な制御を実現します。
まとめ
ここまで、車載マイコンの基礎から、プログラム開発の流れ、そしてルネサス車載マイコンRL78の主な周辺機能までご説明してきました。
最後に、本記事のポイントを3つにまとめます。
1.車載マイコンの基礎
・ルネサスのRL78マイコンは、今後の車載動向および進化に対応可能な、
アクチュエータ用MCUの新たな要求に応える為の幅広い機能を搭載している!
2.マイコンのプログラム開発入門
・プログラム開発には様々な工程があるが、統合開発環境(CS+)を用いると
プログラミング、コンパイル、書き込み、テストまで一貫して実施可能!
・CS+にはコード生成機能があり、システムが簡単に実装可能!
3.車載マイコンの主な周辺機能
・ルネサス車載マイコンRL78の主な周辺機能は、ポート、タイマー、A/D変換、通信機能!
・ポート機能をプログラムで制御することでLEDを点灯、また、タイマー機能をプログラムで制御することでLEDを点滅させることができる!
以上となります。
車載組み込みソフトウェアに初めて触れる際に、ぜひ参考にしていただければ幸いです!