- 公開日:2018年10月19日
- | 更新日:2022年10月14日

新入社員が制作実習でドローンの自作に挑戦した話。(1)
- ライター:umamiti
- その他
はじめに
はじめまして。2018年4月からFAEとして入社した旨道(うまみち)です。
富士エレクトロニクスでは技術職に配属された新入社員に対して制作実習の課題が与えられます。平たく言うと、「自社で取り扱っているマイコンを使って実際にものづくりをしてみよう!!」というものです。
何を作るかにあたって過去の先輩が何を作ったのかを参考にしました。できれば先輩より凄いものを作りたい。また、なんとなくプロペラを使ったものが良いと思い、「ドローンって自作できないの?」という考えに至りました。
ドローンとは?
今ではほとんどの人が知っている、聞いたことがある名前だと思います。多くの方は4つのプロペラを持ち、遠隔操作で飛ぶものをイメージすると思います。
そもそも「ドローン」という言葉は本来「無人飛行機」を意味しています。人が乗って操作していなければそれはすべてドローンと呼ぶことができます。
一方、「マルチコプター」や「クアッドコプター」と呼ぶこともあります。マルチコプターやプロペラが複数付いているもの、クアッドコプターはプロペラが4つ付いているものを指しています。これには有人、無人の区別はありません。
なので、「4つのプロペラを持った無人飛行機」はドローンであり、クアッドコプターでもあり、マルチコプターでもあります。
クアッドコプターの動作原理
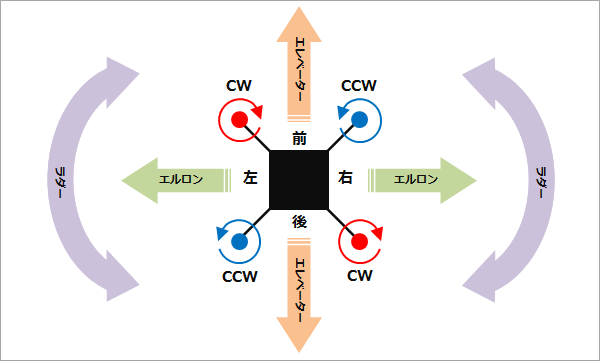
クアッドコプターの飛行原理ですが、CW(時計回り)と、CCW(反時計回り)の2種類のモーターが上図のように配置されています。まず4つのモーターが全て同じ回転数で、徐々に回転数を上げていくと、真上に上昇し、一定の回転数を保ち続ければ、ホバリングすることが可能になります。上昇する動作を「スロットル」と呼びます。
もし前進したい場合は、前側のモーター2つの回転数を後ろ側2つのモーターより下げることで、わざと傾けます。そうすると、傾いた方向に機体が移動します。後退するときはその逆に制御すればいいです。この前後の動きを「エレベーター」と呼びます。
左右の場合も原理は同じで、左右の動きを「エルロン」と呼びます。
その場で旋回する動きは「ラダー」と呼びます。もしCW(時計回り)に旋回したい場合は、CWのモーター2つの回転数を、CCW(反時計回り)2つの回転数より上げることで、CWに旋回することができます。
ドローンの動き
制作実習の仕様を決める!
製作実習では、以下の3つの条件をクリアする必要があります。
■制作実習3つの条件
- Texas Instruments社のマイコンを使用する
- 基板回路を自主製作する(評価ボードと組み合わせたものでもよい)
- 製作期間は1ヶ月
この条件とドローンを組み合わせて検討した結果、「定時過ぎに働く社員のうしろで、不愉快な音と光を出し続けることで、退社を促す」という、その名も「残業監視ドローン」というものを作ることにしました!
具体的な仕様は、特定の時間になったら自動で浮上し、一定の高さを維持してLEDを点滅させる、というものです。操縦機能は1ヶ月の製作期間を考慮し、搭載しないことにしました。
ブロック図は以下の通り。ESCはElectronic Speed Controllerの略で、PWM信号でモーターの回転速度を制御できるコントローラです。ESCと6軸センサーは既成品を購入してそのまま使用することにしました。
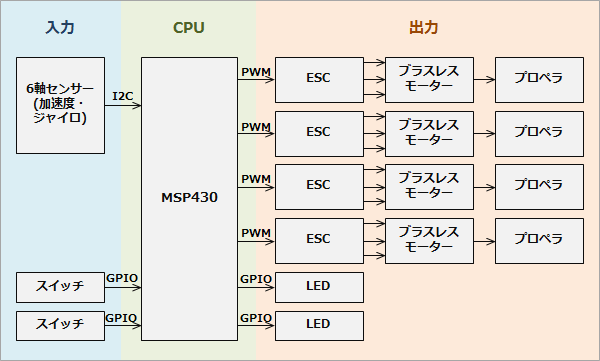
ブロック図
シミュレーション・ツールで確認してみる
仕様が決まったのはいいものの、そもそも飛ばなかったら意味がありません。実現性の確認が必要です。
そこで、「eCalc」というサイトでドローンのシミュレーションを行いました。ここではモーターの仕様、機体の重量、プロペラの大きさなどのパラメータを入力することで、そのドローンが飛ぶのか飛ばないのか、飛ぶとしたらどのくらいの飛行時間になるのかをシミュレーションすることができます。
以下はそのシミュレーション結果です。
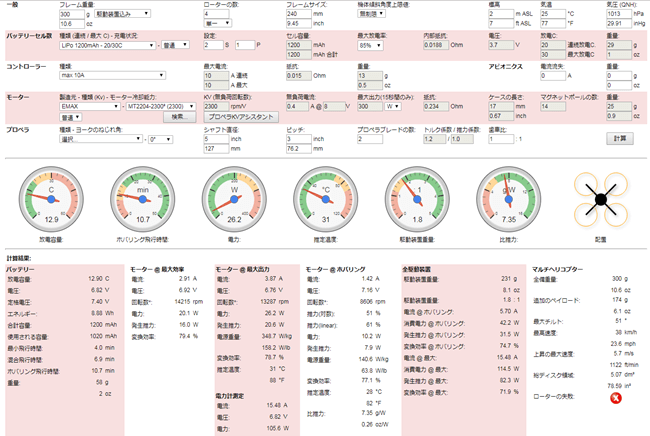
シミュレーション結果
使用予定の部品の総重量の見込みはおよそ300g。既成品の組み合わせで作成していくので重量はどうしても重くなってしまいます。ただ、シミュレーション結果を見ると飛行時間は短いものの、ホバリングすることは可能なようなので、このまま行くことにします!
製作実習プレゼンの結果・・・
実際の製作に取り掛かる前に、これらの内容を資料にまとめて先輩社員に見てもらいました。
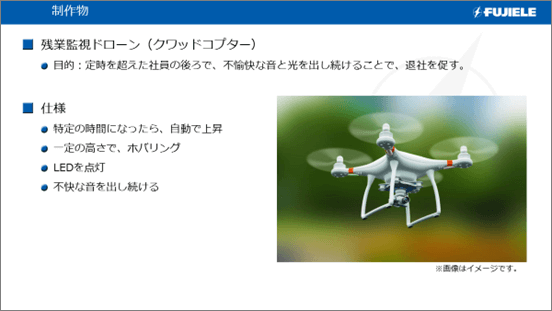
制作実習の発表資料(一部)
発表したところ、
「きびしいだろうね。」
「これは無理でしょう(の顔)」
「浮くだけでも大変だよ」
との意見が多数。
確かに機体を水平に保つための制御部分のプログラムを自作するのが最難関であることは確かです。当初の感想は「難しそうだけど、気合でなんとかなりそう!!」というものでしたが、まさかあんな地獄が待っているとは・・・
次回は動力であるブラシレスモーターの制御に取り掛かります。お楽しみに!