- 公開日:2019年08月07日
- | 更新日:2022年11月30日

ドローンを自作する方法 ~部品や回路図の基礎知識~
- ライター:umamiti
- その他
今回制作するものは、「残業監視ドローン MrkⅡ」です。前回、挑戦して浮かなかったのですが、改めてドローンがホバリングでき、なおかつコントローラで操縦できるようにすることを目指します。この残業監視ドローンで、「定時を過ぎた社員の後ろで、不愉快な音と光を出し続け、退社を促す」ということが最終目的です。
ドローンを基板から作成
今回は、評価ボードを使用するのではなく、基板を一から作成します。また、コントローラ用の基板ではBLE(Bluetooth Low Energy)を使用するので、技適(技術基準適合証明のマーク)の取得が必要となります。さらに、開発した基板を社内の評価用ボードと合体できるようにし、本来の目的以外にも活用できるようにします。
ドローン、コントローラの仕様を決める
まずはドローン、コントローラの仕様決めから始めましょう。機能を後で追加するのは大変です。そのため、最初の段階で予想できる機能を実装しておくことが大切です。ドローン側の仕様と、コントローラ(プロポ)側の仕様、それぞれについて見ていきましょう。
ドローン側の仕様
・一定の高さでホバリング(制御)
・LEDを点灯(電源、BLE接続、バッテリー残量)
・2300kVのモーター+MAX12AのESC(Electric Speed Controller、アンプやスピコンとも呼ばれる)
・プロペラは5×3
・コントローラ(プロポ)の操作でモーターの回転数が変化(操縦)
・最大動作周波数は25MHzから、120MHzに変更(約5倍)
・バッテリーを2セル(7.4V)から、3セル(11.1V)に変更(出力向上)
・筐体の大きさを250mmサイズから、220mmサイズに変更(軽量化)
・筐体の素材をプラスチックから、カーボンファイバーに変更(衝撃・ノイズ対策)
・イーサネット用のコネクタを搭載(多機能化)
・スポークボードに接続可能
下記にブロック図と電源ツリーを記載します。
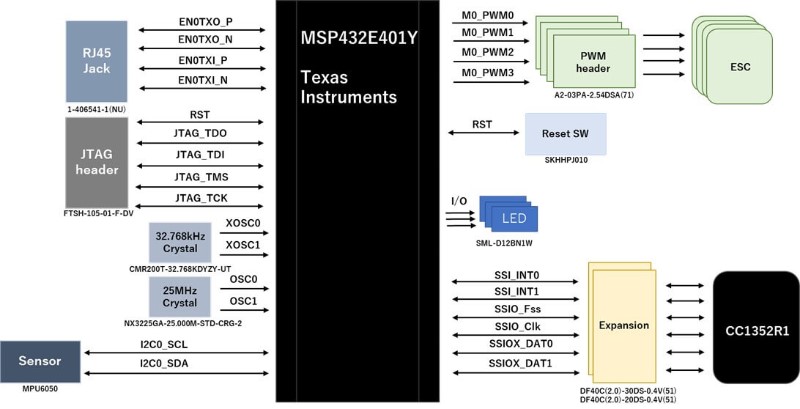
図1ドローンの ブロック図
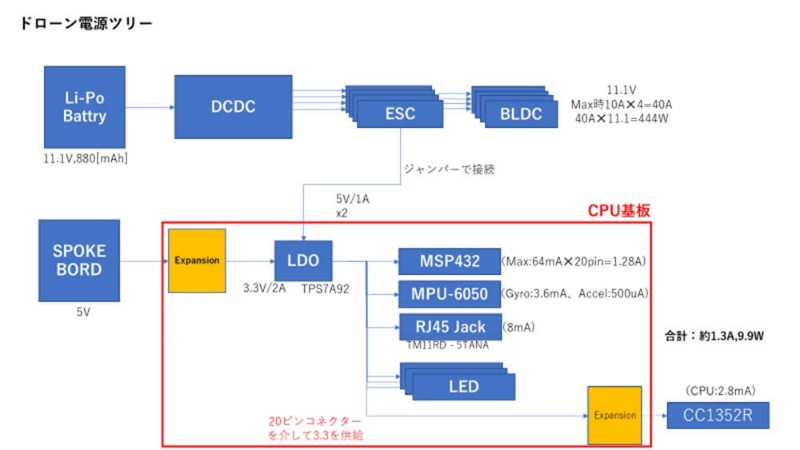
図2ドローン側の電源ツリー
コントローラ(プロポ)の仕様
・2.4GHzのBLE通信によるコントローラを作成し、機体を操作
・Sub-1GHz用のアンテナ接続端子も用意
・ジョイスティックを2本使い、4軸分の入力を回転数に反映
・電池は乾電池(1.5V)を2本利用し3.0V駆動
・Flashメモリを搭載
下記にブロック図と電源ツリーを記載します。
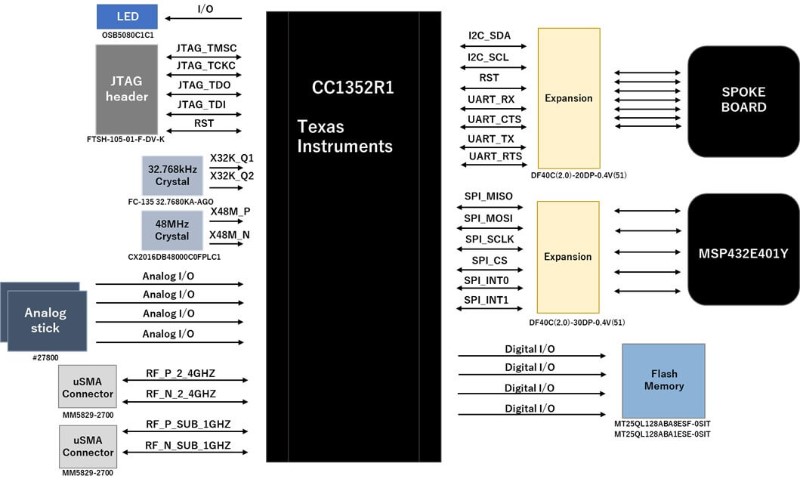
コントローラ側のブロック図
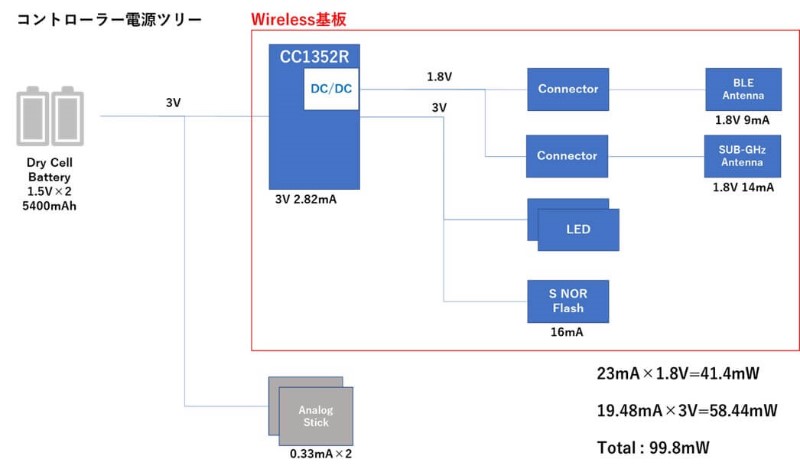
コントローラ側電源ツリー
シミュレーション結果を確認する
eCalcというサイトを利用し、シミュレーションを行いました。結果は次の通りです。

図5シミュレーション結果
さらに、5×3のプロペラを付けたモーターの回転数を実測してみました。すると、一つのモーターが約150gの推力を持っていることが判明し、4つのモーターで約600gまでの重さを持ち上げられるはずだということがわかりました。
工程と役割分担を明確にする
ドローンとコントローラの仕様が決まったので、必要な作業や部品が見えてきました。これにより、必要な資金についても見通しがついたのですが、基板の作成には多大なお金がかかることがわかりました。
必要な工程と、役割分担を明確にして、効率のいい制作プランを作成しましょう。
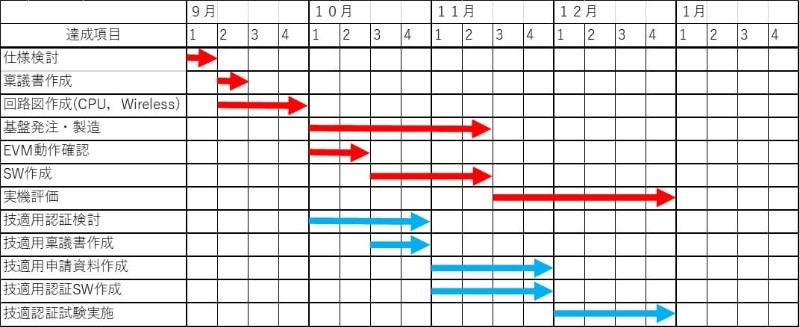
図6工程管理表
大きく分けると、技適班、コントローラ班、ドローン班の3班の編成になりました。コントローラ班の人は技適班とドローン班の両方に大きく関わっていく役割となります。
まとめ
今回のコラムでは、ドローンやコントローラを自作する際に必要な部品や回路図について解説し、スケジュールの作成や役割分担を行いました。「ドローンを自作したい」「ドローンの作り方が知りたい」という方にとって、お役に立てば幸いです。
MSP432、CC1352などのチップについて、詳しくはこちら
MSP432E401Y SimpleLink™ イーサネット・マイコン
CC1352R SimpleLink™ マルチバンド・ワイヤレス・マイコン