- 公開日:2021年08月31日
- | 更新日:2022年11月30日
ミリ波の技適を取ってみた! [第1話:仕様を考えよう]
- ライター:una
- センサー
はじめに
ミリ波を用いたセンサーは、高い精度で物体を検知でき、耐環境性も優れているため、様々な産業機器分野への応用が期待されています。
物体を検出するセンサーとしては、赤外線センサーや超音波センサーなどがありますが、ミリ波センサーはこれらと比較しても物体の検知距離や分解能などの優位点があるものの、日本国内で使用するためには、電波法に基づく技術基準適合証明(以下、技適証明)を取得する必要があります。(海外でミリ波センサーを使用する場合も、各国が定める法律を遵守する必要があります)
本稿では、ミリ波センサーの選定から、デモキットの作成、技適取得までを数話に渡ってお届けします。
ミリ波センサーについては、下記の記事もご覧ください。
ミリ波センサーの選定
まず、ミリ波センサーに用いるセンサーIC選定を行います。
今回はなるべくシンプルに技適を取得したいため、ミリ波送受信機能と、受信したデータに対して、デジタル処理が可能なCPU機能の両方を1デバイスで実現できる、Texas Instruments社(以下、TI社)のIWR6843AOPを選びました。
このデバイスはアンテナも内蔵しているため、従来専門的な知識が必要なアンテナ設計も省略できるという点も選定のポイントとなっています。

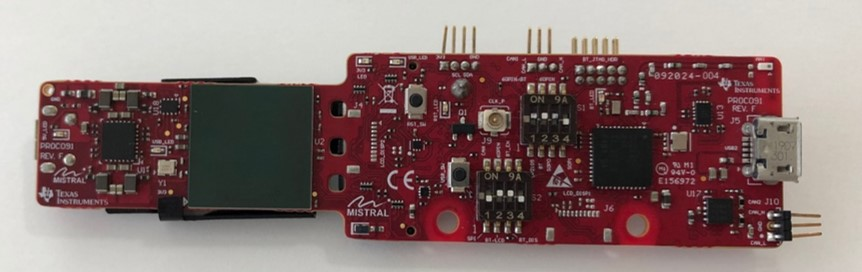
また、IWR6843AOPが搭載された評価ボード「IWR6843AOPEVM」は、非常に小型であり、電源ICやフラッシュメモリも実装されているため、単体でミリ波センサーとしてのアプリケーションを動作させることができるので、この評価ボードを加工してミリ波デモキットを作成していきます。
 IWR6843AOPEVM
IWR6843AOPEVM
筐体設計
技適を取得するためには、ミリ波センサーから出力される電波を外部から変更できないようにするとともに、ミリ波チップ(高周波部及び、変調部)が搭載された基盤は特殊ネジなどを用いて封止し、第三者が容易に開けることができないような構造にする必要があります。
IWR6843AOPEVMの右半分はJTAG機能などデバッグ用途のインターフェースが実装されていますが、実動作ではこれらの機能は不要なので、IWR6843AOPが実装されている左半分と切り離し、より小さな筐体で封止できるように加工します。
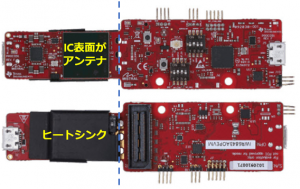
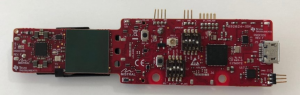
加工後の基板は、40㎜x15㎜程度の大きさとなりますので、これを市販のプラスチックケースとヒートシンクで囲い特殊ネジで封止する構造としました。基盤はポリカーボネート板を用いて位置を固定し、熱伝導シート挟んでヒートシンクと設置させます。
 筐体構造図
筐体構造図
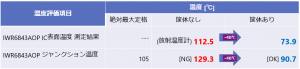
また、筐体は密封された構造となりますので、ミリ波チップの温度条件を満たせるようにプラスチックケースに放熱穴を複数個所あけます。
今回作成した筐体を用いると、IWR6843AOPチップ表面温度で約40℃熱低減させることができました。
 ミリ波デモキット筐体
ミリ波デモキット筐体
ミリ波アプリケーションの選定
TI社からIWR6843AOP向けの様々なサンプルプログラムが提供されています。アプリケーションはこれらのサンプルプログラムベースにして実装を検討します。
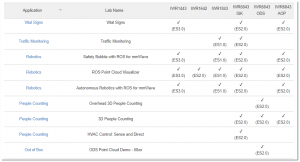 出典:Texas Instruments-mmWave Labs
出典:Texas Instruments-mmWave Labs
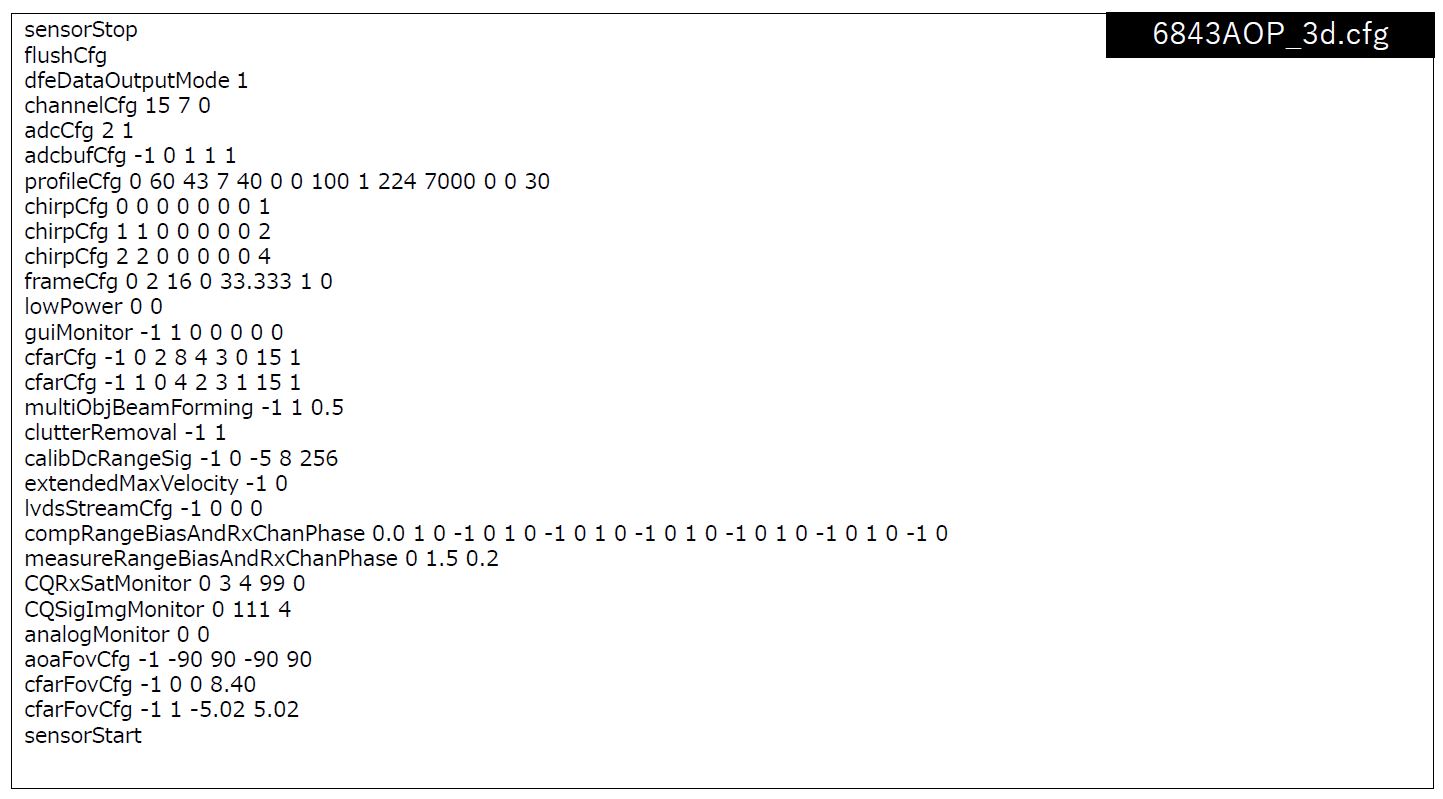
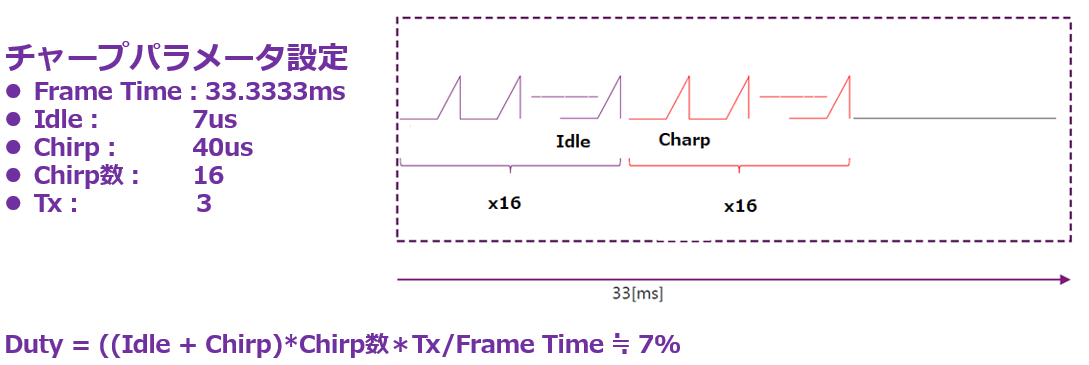
IWR6843AOPは60GHz帯のミリ波を扱うことができるデバイスであり、この周波数帯を利用したセンサーシステムを利用する場合、システム設計条件として特定の時間内(33ミリ秒以内)に電波発射可能な時間率を10%以内とする必要があります。また、変調方式にはFMCW(周波数連続変調)が用いられており、この変調を行った送信波をチャープと呼びます。
電波発射時間(Duty)は、チャープの送信時間(Chirp)、送信するチャープ数(Chirp数)、チャープ間のアイドル時間(Idle)、そしてチャープを送信するアンテナ本数(Tx)から机上計算で求めることができます。これらのチャープパラメータは、ソフトウェアによって調整可能です。
この電波放射時間のデフォルト設定値はサンプルプログラムにより様々ですが、条件(33ミリ秒以内に10%の電波放射時間)に近いものから、“ROS Point Cloud Visualizer”を利用することとしました。実運用ではデフォルトのチャープパラメータを調整し、電波放射時間は約7%程度に設定しています。
 調整後のROS Point Cloud Visualizerアプリの電波放射時間
調整後のROS Point Cloud Visualizerアプリの電波放射時間
まとめ
今回は技適取得を目的としたミリ波デバイスの選定から、筐体設計、アプリケーション選定に至る流れをご紹介させていただきました。
技適取得に向けて、システム設計条件(筐体設計、電波送信時間制御)を考慮して仕様を決めていくことがポイントになります。
次回は、アプリケーションソフトウェア(ROS Point Cloud Visualizer)の評価方法についてご紹介させていただきます。