- 公開日:2021年08月06日
- | 更新日:2024年03月14日
ステッピングモーターの種類とその特徴
- ライター:4ug
- モータードライバー
ステッピングモーターには、構造の異なるユニポーラ型とバイポーラ型のモーターがあります。 ユニポーラ型は比較的簡単な駆動回路で使用することができるのに対し、バイポーラ型は複雑な駆動回路が必要です。 半面、バイポーラ型は、ユニポーラ型に比べ大きな低速トルクを得ることができます。 ここでは、ユニポーラ型とバイポーラ型ステッピングモーターの違いについて、駆動回路を含め、詳しく見て行きます。 モーターを選定する際の参考にして頂ければ幸いです。
ステッピングモーターとは
初めにステッピングモーターとは、どのようなモーターであるのかを説明します。
ステッピングモーターは、図.1のように中心の回転子(永久磁石)が周りの磁化されたコイルに引き付けられるように回転します。この結果、パルスの数に応じ、決まった角度だけ動きます。パルスの数や速さに従い回転角度や回転速度を調整することが出来ます。

図.1 ステッピングモーターの内部構造 (左:全体 / 右:拡大)
ステッピングモーターの種類
では、ユニポーラ型とバイポーラ型2種類のステッピングモーターの構造と特徴を説明します。
- ユニポーラ型ステッピングモーター
ユニポーラ型ステッピングモーターの構造を図.2に示します。独立したコイルが4個有ります。

図.2 ユニポーラ型ステッピングモーターの内部構造 コイルのみ (左:イメージ図 / 右:簡易回路図)
ユニポーラ型ステッピングモーターの特徴は、以下です。
-
- 常に一定の方向に電流を流す為、制御回路が簡単
- 同じサイズのモーターの場合、バイポーラに比べて巻き数が少ない為に半分のトルクしか得られない
- ON / OFF 時の逆起電圧が大きいためにFETの耐圧を高くする必要がある
図3を見るとわかるかと思いますが、1個のFETで1個コイルを駆動します。コイルには、一方向にのみ電流が流れます。
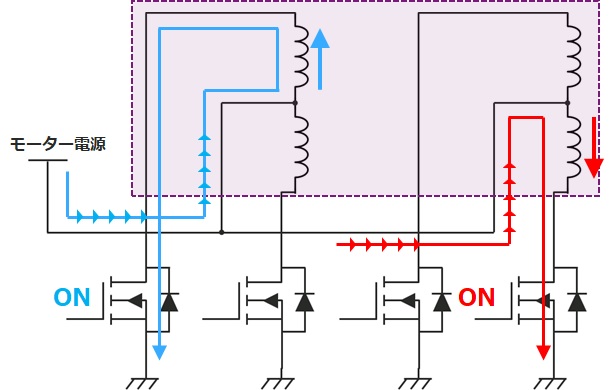
図.3 ユニポーラ型ステッピングモーターの駆動回路図
ユニポーラ型では、モーターの構造は複雑ですが、駆動する回路は簡単になります。しかし、逆起電圧は高くなり、その対策が必要です。
また、同じサイズのバイポーラ型のモーターに比べて少なく、トルクが小さくなります。
-
- 制御回路をシンプルにしたい
- 大きなトルクは必要無い
このような用途に最適なステッピングモーターです。
- バイポーラ型ステッピングモーター
バイポーラ型ステッピングモーターの構造を図.4に示しなります。独立したコイルが2個有ります

図.4 バイポーラ型ステッピングモーターの内部構造 コイルのみ (左:イメージ図 / 右:簡易回路図)
バイポーラ型ステッピングモーターの特徴は、以下です。
-
- 一つのコイルに対し双方向に電流を流す為、制御回路が複雑
- 同じサイズのモーターの場合、ユニポーラに比べて巻き数が多い為に高いトルクが得られる
- Slow Decay(低速減衰)(*1)モードを選択すればON / OFF 時の逆起電圧が低減できる為、低い耐圧のFETを使用することが出来る
図5を見るとわかるかと思いますが、1個のコイルを駆動するための4個のFETが必要です。コイルへは、Hブリッジを使って、双方向に電流が流すことができます。

図.5 バイポーラ型ステッピングモーターの駆動回路
バイポーラ型では、モーターの構造はシンプルになります。しかし、駆動回路が複雑になり、回路設計は難しくなります。しかし、ICの集積化が進んだことで、この欠点は解消されました。
また、同じサイズのユニポーラ型のモーターに比べ、巻き数が多いため大きなトルクを得ることができます。
-
- 大きなトルクが必要
- 逆起電圧は小さく抑えたい
このような用途に最適なステッピングモーターです。
*1: 各Decay(減衰)に関しては「ステッピング・モーターの制御で重要な“Decay(電流減衰)”って知っていますか?~第一部:Decayとは~」を参照下さい
ユニポーラ型とバイポーラ型ステッピングモーターの逆起電圧について
ステッピングモーターを使用する際に、最も注意すべき点の一つが、逆起電圧です。ステッピングモーターを駆動すると言うことは、モーターに内蔵されたコイルに電流を流したり止めたりすることです。コイルは、そこに流れる電流を変化させようとすると、自己誘導作用により、電流の変化を妨げようと、コイル両端に電圧を発生させます。例えば、駆動するFETがONからOFFに変わると、電流を流し続ける様、コイル両端に電圧が発生します。その後、再度FETがONした際にモーターの電源電圧に自己誘導作用で発生した起電圧が加算されします。 出力段のFETは、この逆起電圧に耐える電圧耐性が求められます。
ユニポーラ型の場合、FETがOFFになった時に電流が抜けるパスが有りません。このため、コイルに蓄えられたエネルギーは大きな逆起電圧となって、FETを破壊しようとします。

図.6 ユニポーラ型ステッピングモーターの自己誘導作用による逆起電圧
バイポーラ型の場合は、OFF時にFETのボディダイオード経由で電流を流すことが出来ます。このため、エネルギーは電流となって放出され、大きな逆起電圧は発生しません。更に、バイポーラ型のSlow Decay(低速減衰)(*1)モードを使うことで、逆起電圧を低く抑えることができ、低い耐圧の安価なFETを使うことが可能になります。

図.7 バイポーラ型ステッピングモーターの自己誘導作用後
ユニポーラ型の場合は、逆起電圧が大きいためにFETの耐圧を超える電圧になることが多く、対策が必要です。その対策例として、モーターのコイル(インダクタ)と並列にクランプダイオードとツェナーダイオードを接続する方法があります。これにより、自己誘導作用により蓄えられたエネルギーは、クランプダイオードとツェナーダイオードで消費されます。これにより逆起電圧を低く抑えることが出来ます。こちらを参考に逆起電圧の対策をお勧めします。
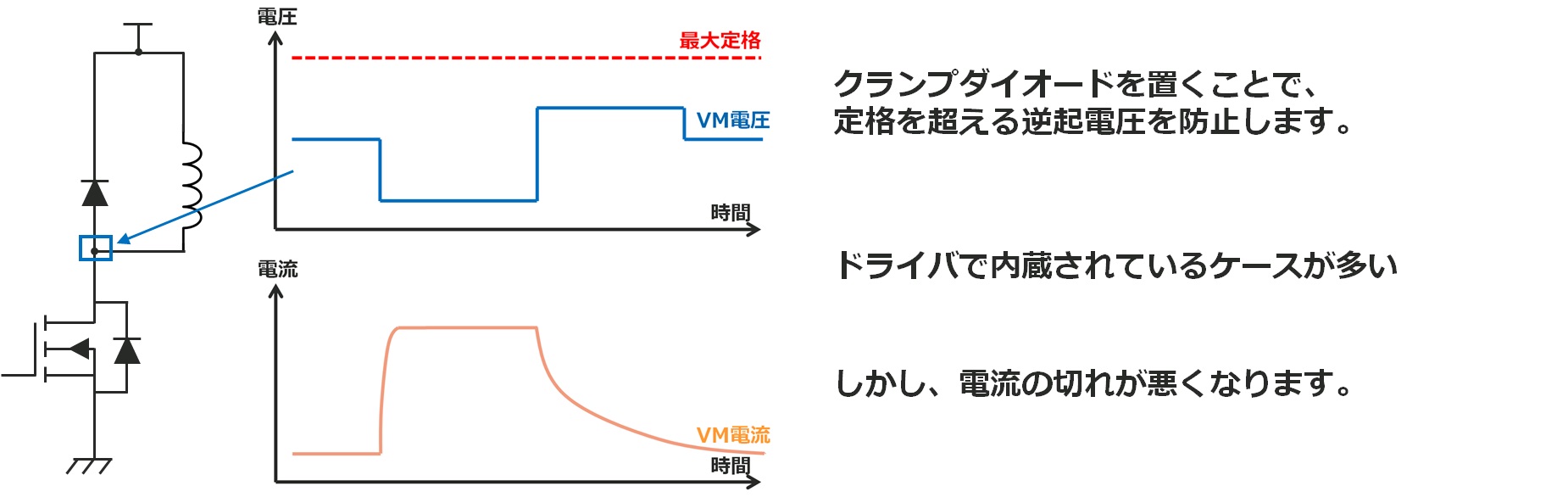
図.8 逆起電圧の対策①

図.9 逆起電圧の対策②
ユニポーラ型とバイポーラ型ステッピングモーターの特徴まとめ
表1に、ユニポーラ型とバイポーラ型ステッピングモーターの特徴をまとめました。
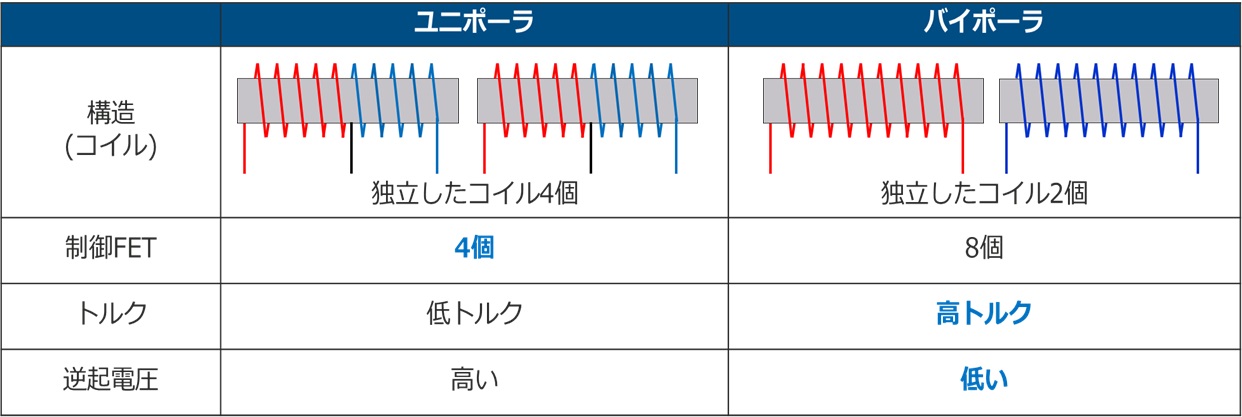
表.1 ユニポーラ型とバイポーラ型の特徴まとめ
ここで挙げた制御FETは駆動するために必要なFETの数です。現在ではFETはMotorドライバーICに集積されています。このため、バイポーラ型の「複雑なドライバー回路」と言う欠点は解消されました。
その為、高いトルクと、低い逆起電圧という利点を生かせるバイポーラ型を使用するケースが多くなってきているように思います。
だからと言って、ユニポーラ型が無くなるとは思いません。ユニポーラ型ステッピングモーターは同じサイズのステッピングモーターの場合に、高速トルクに向いています。
下記は、TI社のアプリケーションノートに記載されているトルクと回転速度の関係グラフです。ユニポーラ型とバイポーラ型で駆動できる範囲が異なります。ユニポーラ型の方が駆動できる回転の速さの領域は広く、高速回転させたい場合は、ユニポーラ型が優位です。
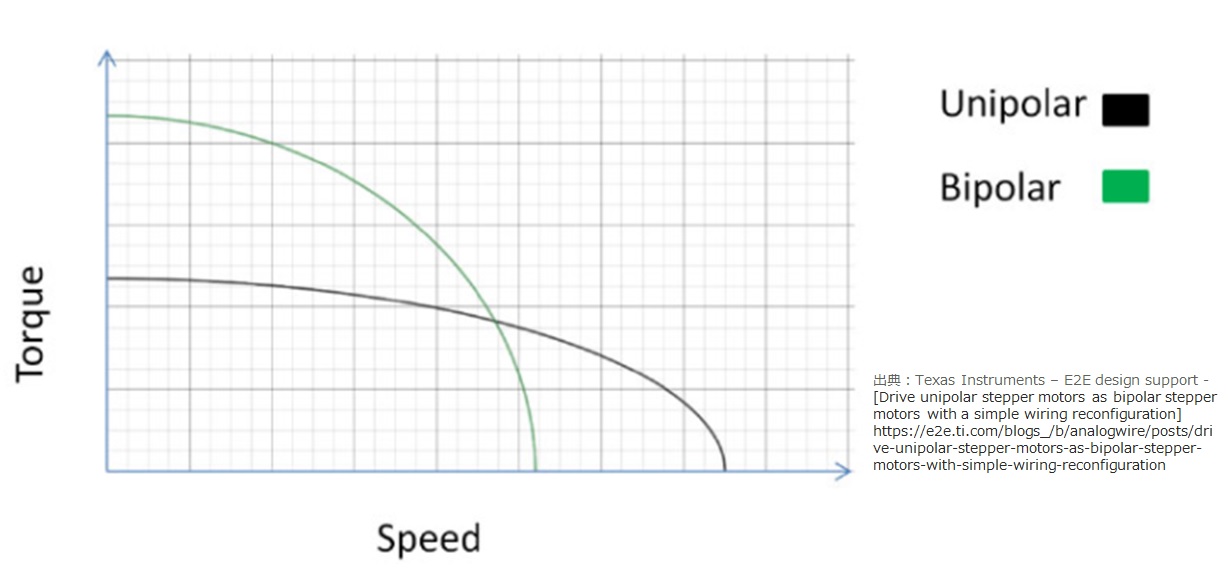
図.10 ユニポーラ型とバイポーラ型ステッピングモーターのトルクと回転速度の関係
アプリケーションの特性に応じたステッピングモーターを使用することが重要です。この記事が選定の際にお役に立てば幸いです。
Texas Instruments社の製品をお探しの方は、メーカーページもぜひご覧ください。
Texas Instruments社
メーカーページはこちら